

Semi-physical simulation method of inertially stabilized platform control system
An inertial stable platform, semi-physical simulation technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as evaluation, development cycle is too long, and the ideal simulation effect cannot be achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
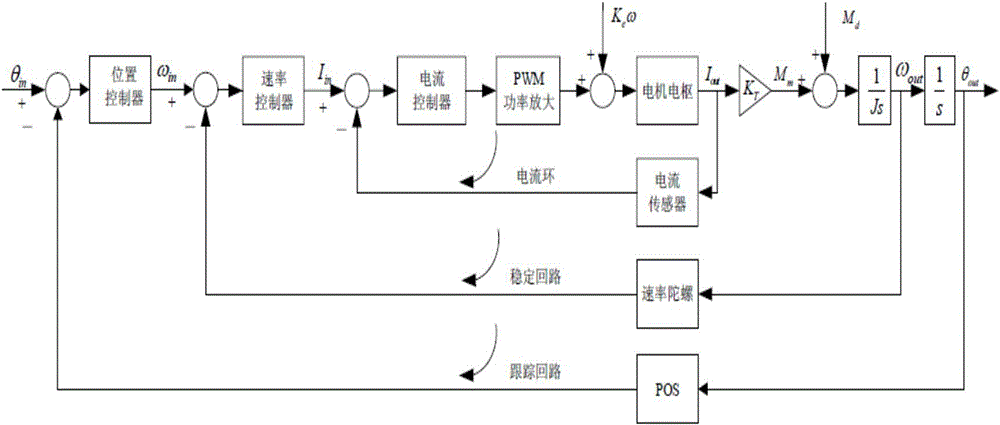
[0021] The control structure of the three axes of the inertial stable platform is basically the same, so the mathematical model of the control system of the single axis inertial stable platform is established first. The working principle of the single-axis inertial stabilized platform control system is as follows: figure 1 shown.
[0022] The inertial stable platform belongs to the motion servo system of mechatronics. The whole control system is a three-closed-loop control system consisting of a current loop, a velocity loop (stabilizing loop) and a position loop (tracking loop). The actuator of the control system is a DC torque motor, the controlled object is a stable platform body, the rate gyroscope is an angular rate sensor, and the POS or accelerometer is a position sensor. The working principle of the control system is that the servo controller generates a control signal to the torque motor based on the angular rate information of the frame sensitive to the rate gyro an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More