

Cooperative control system for multiple welding robots based on improved particle swarm algorithm
A welding robot, improved particle swarm technology, applied in welding equipment, comprehensive factory control, auxiliary welding equipment, etc., can solve the problems of high welding quality requirements, large workpiece size, low work efficiency, etc., and achieve the optimization of welding path , to achieve the effect of collaborative control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
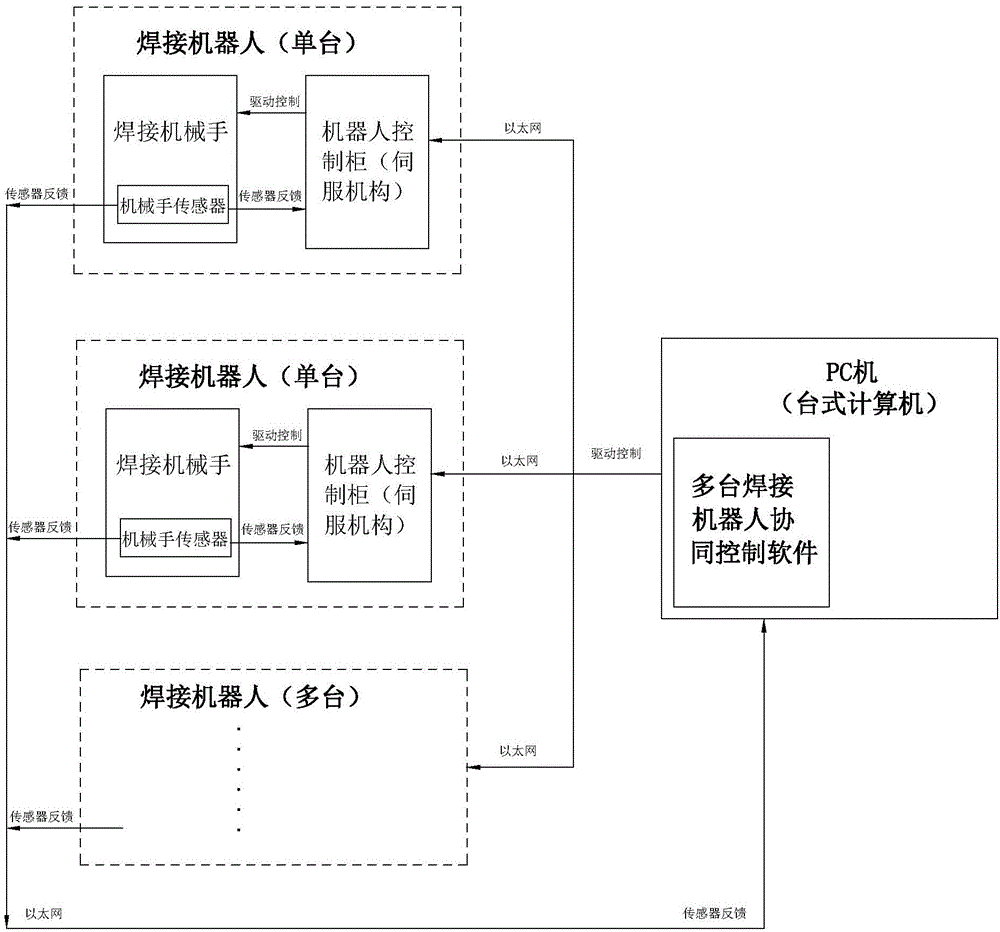
[0015] Such as figure 1 As shown, the collaborative control system of multiple welding robots based on the improved particle swarm algorithm of the present invention (referred to as "cooperative control system") includes a PC with collaborative control software installed and multiple welding robots. The PC is a desktop computer, and each The welding robot includes a manipulator for welding and a robot control cabinet that drives and controls the work of the manipulator. The manipulator is equipped with a manipulator sensor for sensing the position of the manipulator. The output ends of the PC are respectively connected to the robot control cabinet of each welding robot through Ethernet, and the PC can be connected through the Ethernet Ethernet card of the PC itself, or an industrial control board can be installed in addition, and connected by the Ethernet Ethernet card. Out of the network cable, the network cable is connected to the controller in the robot control cabinet of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More