

Numerical value calibration method for line structured light vision sensor
A visual sensor and line structured light technology, applied in the direction of instruments, optical devices, measuring devices, etc., can solve the problems of small number of calibration points, extraction error calibration accuracy, limited measurement range, etc., and achieve simple production, simple method and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific implementation manners of the present invention will be further described below in conjunction with the accompanying drawings, so as to make the technical solution of the present invention easier to understand and grasp.
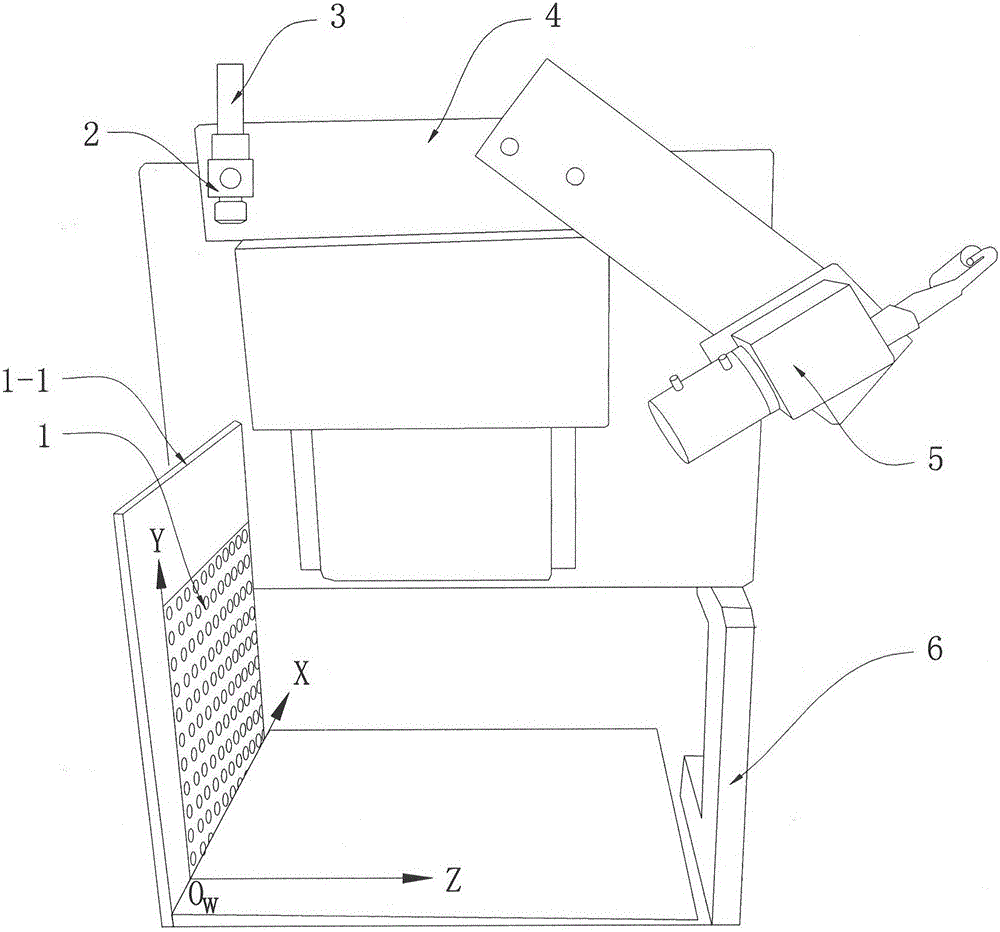
[0042] figure 1 It is a calibration diagram of a line structured light vision sensor, which is composed of a calibration target 1, a laser fixing sleeve 2, a line laser 3, a connecting frame 4 between the line laser and the camera, a camera 5, and a vertical support 6, and is characterized in that:
[0043] The calibration target 1 is placed vertically, and the target plane coincides with the laser plane emitted by the line laser 3;
[0044] In order to meet the requirement that the target plane coincides with the laser plane, the shape of the line laser 3 should be cylindrical, and can be rotated at a specific angle in the laser fixing sleeve 2; the laser fixing sleeve 2 is characterized by a Circular sleeve, its inner diameter is sligh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More