

Hyperspectral geometric correction method for UAV airborne imaging
A geometric correction and unmanned aerial vehicle technology, applied in the field of image processing, can solve the problems of difficult polynomial correction geometric fine correction, high POS accuracy requirements, increased costs, etc., to achieve the effect of improving the accuracy of POS information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
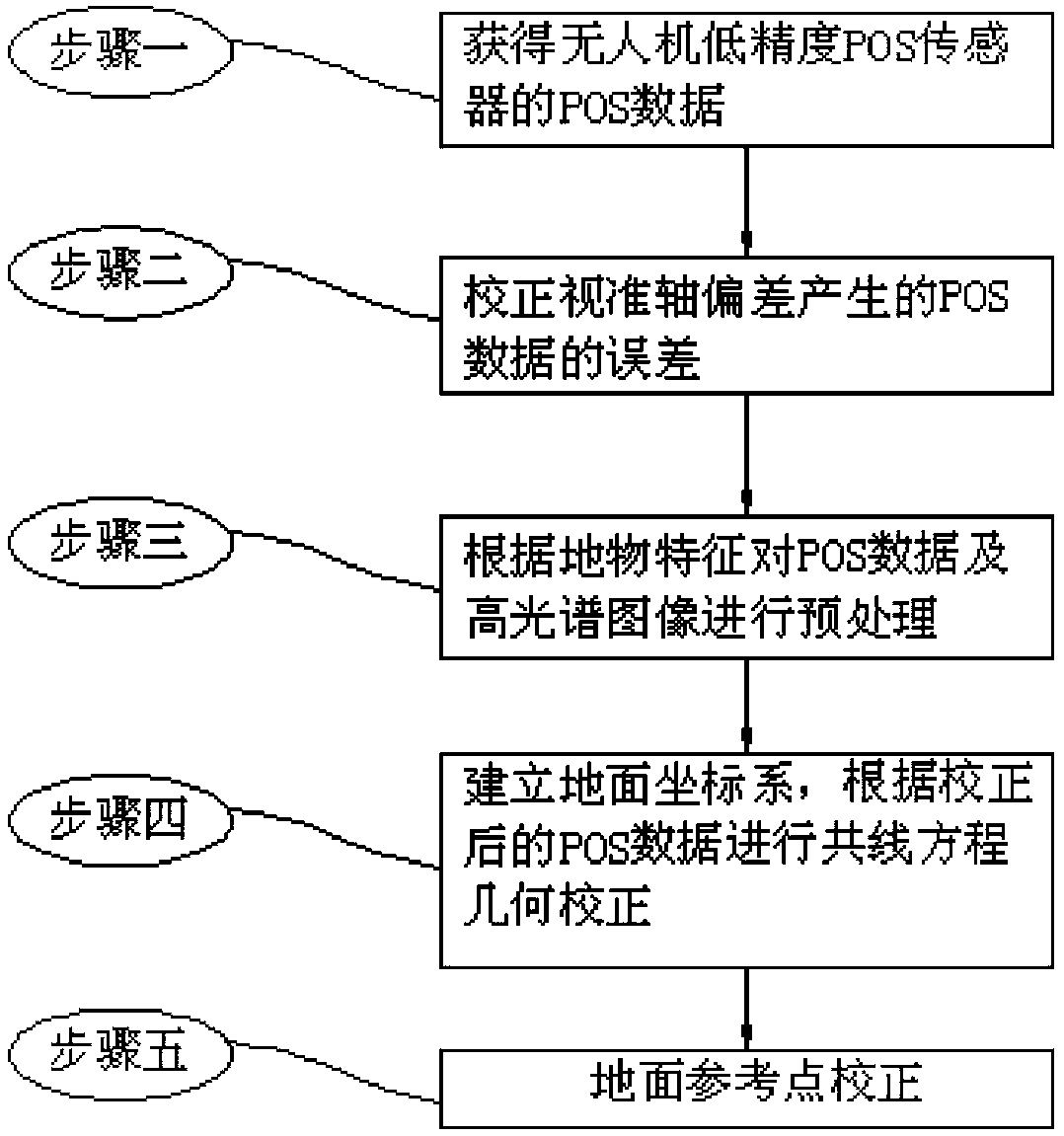
[0020] The hyperspectral geometric correction method of drone airborne imaging of this embodiment combines figure 1 As shown, the method is implemented through the following steps:
[0021] Step 1: Obtain the POS data of the UAV's low-precision POS sensor: pitch angle Φ, roll angle Ω, azimuth angle Ψ, altitude h, and obtain the UAV GPS information at the same time;
[0022] Step 2: Correct the error of POS data caused by the deviation of the collimation axis;
[0023] Step 3: Preprocess the POS data and hyperspectral images according to the features of the ground features;
[0024] Step 4: Establish a ground coordinate system, and perform geometric correction of the collinear equation based on the corrected POS data;
[0025] Step 5. Ground reference point correction.
specific Embodiment approach 2
[0026] The difference from the first embodiment is that in the hyperspectral geometric correction method for drone airborne imaging in this embodiment, the process of correcting the POS data error caused by the collimation axis deviation in step 2 is:
[0027] Step 2: Use the standard calibration field to obtain the accurate position information of the standard reference object;
[0028] Step 2: Suppose the collimation axis deviation is (ex, ey, ez) and the POS data is (Φ, Ω, Ψ), then the orthogonal transformation matrix R formed by the image attitude angle is expressed as:
[0029]
[0030] Among them, ex is the rotation error in the X direction, ey is the rotation error in the Y direction, and ez is the rotation error in the Z direction;
[0031] It is the transformation matrix from the IMU coordinate system to the object coordinate system, including:
[0032]
[0033] For the transformation matrix from image space to IMU coordinates, there are:
[0034]
[0035] Step two and three, ...
specific Embodiment approach 3
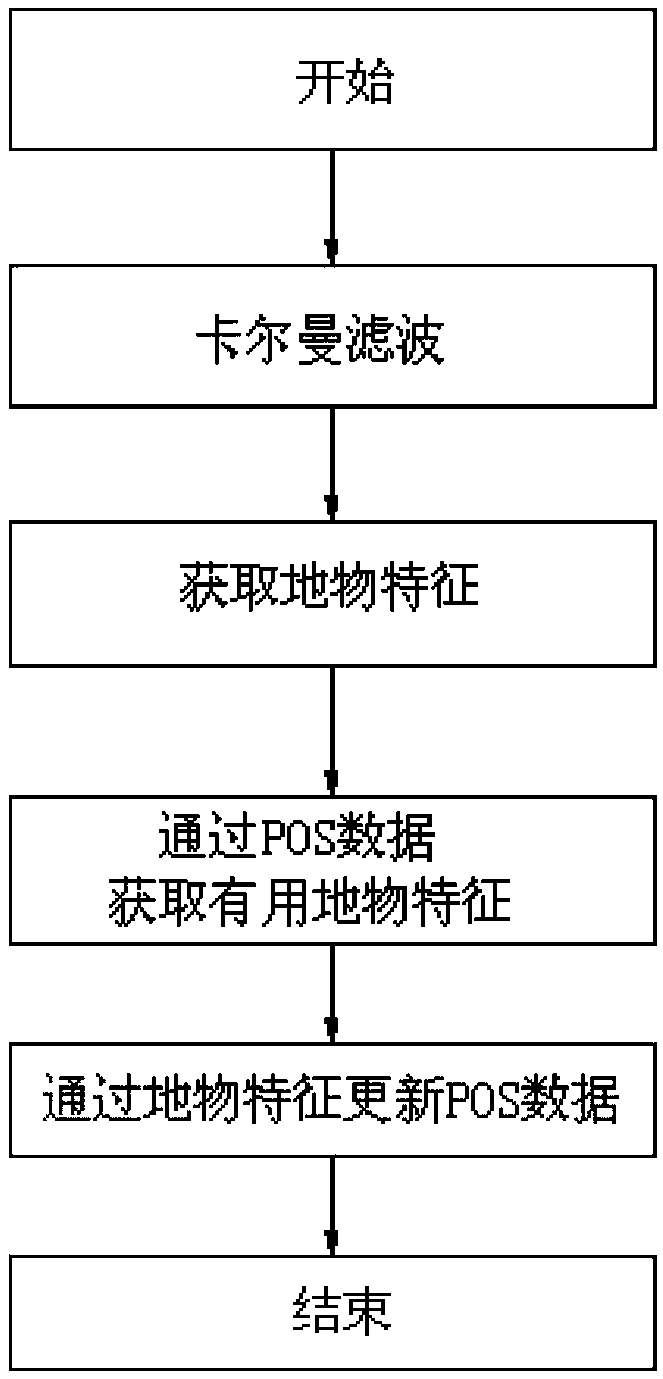
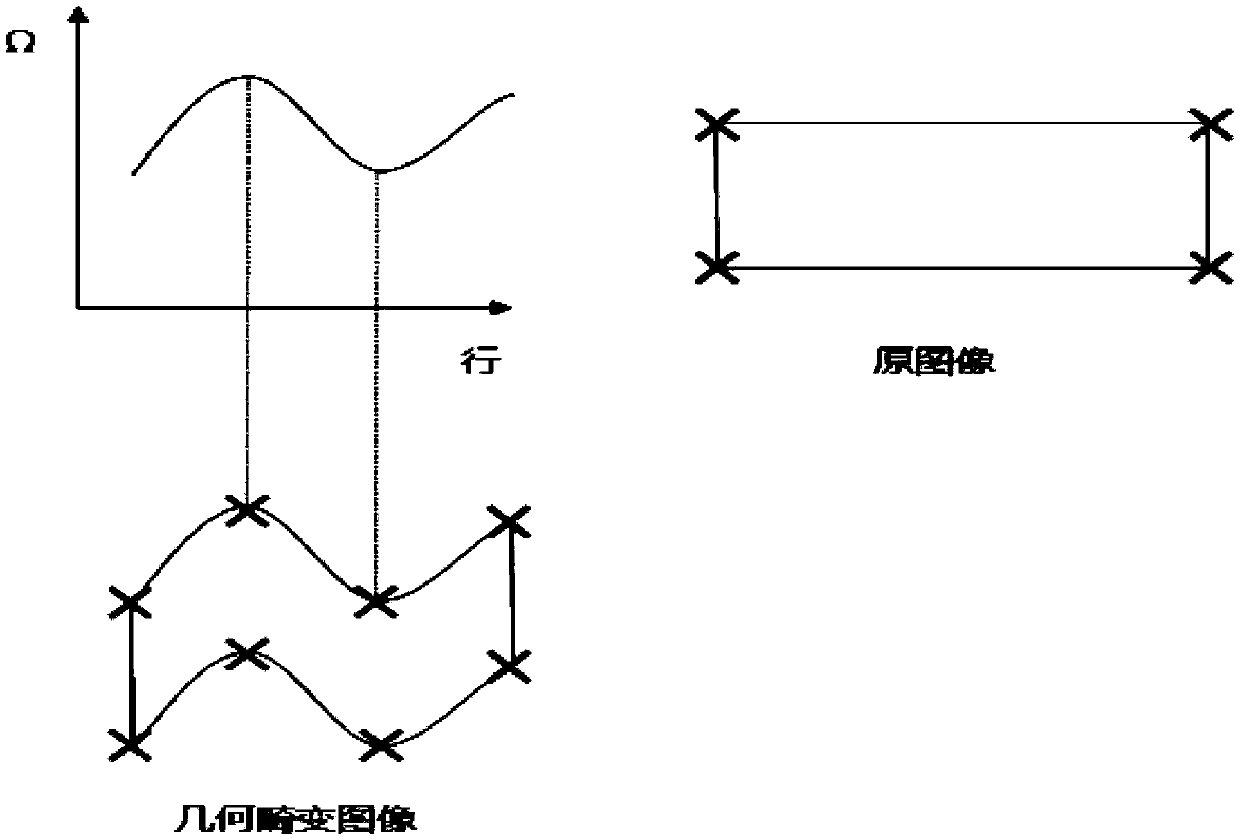
[0039] The difference from the first or second embodiment is that in the hyperspectral geometric correction method for airborne imaging of drones in this embodiment, the process of preprocessing POS data and hyperspectral images according to feature characteristics in step 3 is: The accuracy of the POS attitude data is very low, resulting in large distortion of the ground objects. After the direct correction, the distortion of the ground objects is difficult to recover. Therefore, the following processing is performed on the POS attitude data, see figure 2 :
[0040] Step three: Carry out Kalman filtering on POS data, and carry out differential correction to GPS information; then according to latitude and longitude information
[0041] Calculate the distance between the abscissa and ordinate of the offset of the scan center relative to the initial scan center, and convert the unit to meters;.
[0042] Step 32: Obtain the corner point information of the hyperspectral image through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More