Non-spherical orthogonal structure two-degree-of-freedom hybrid stepping motor and its method
A stepping motor and degree-of-freedom technology, applied in the field of electric motors, can solve the problems of large overall volume and weight of the motor, high open-loop positioning accuracy, and difficult processing technology, achieve mechanical integration and high material utilization, and simplify electromagnetic calculations. and performance analysis, the effect of simple mechanical connection structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
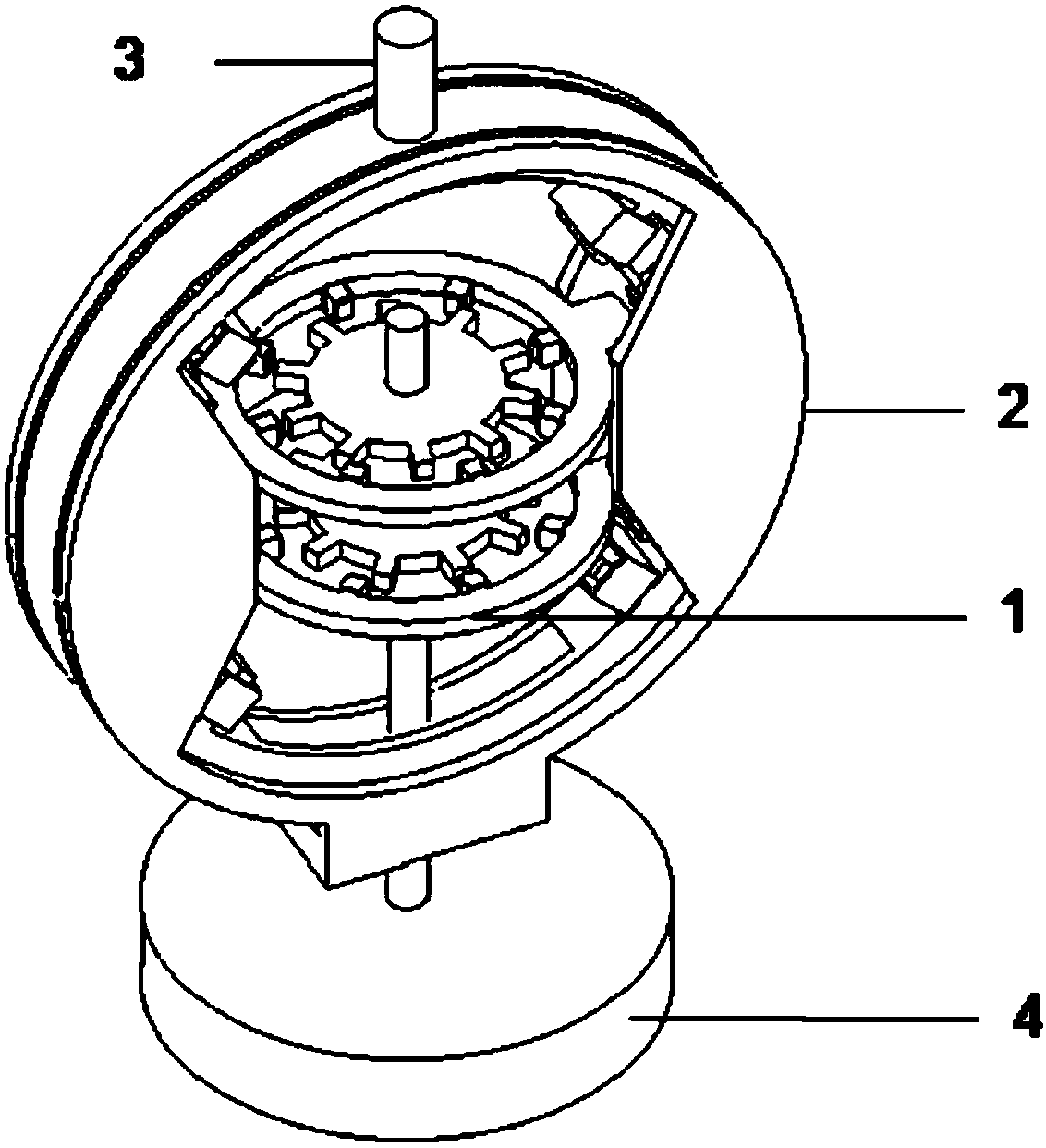
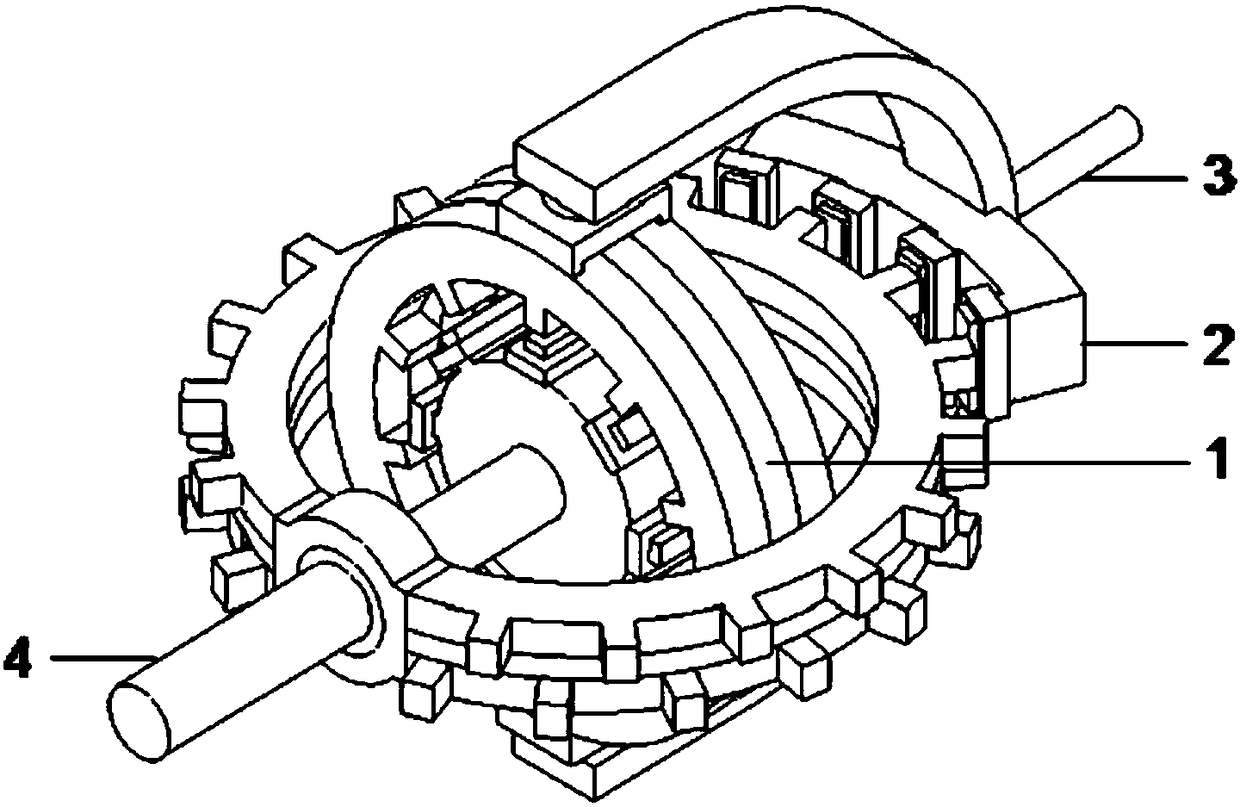
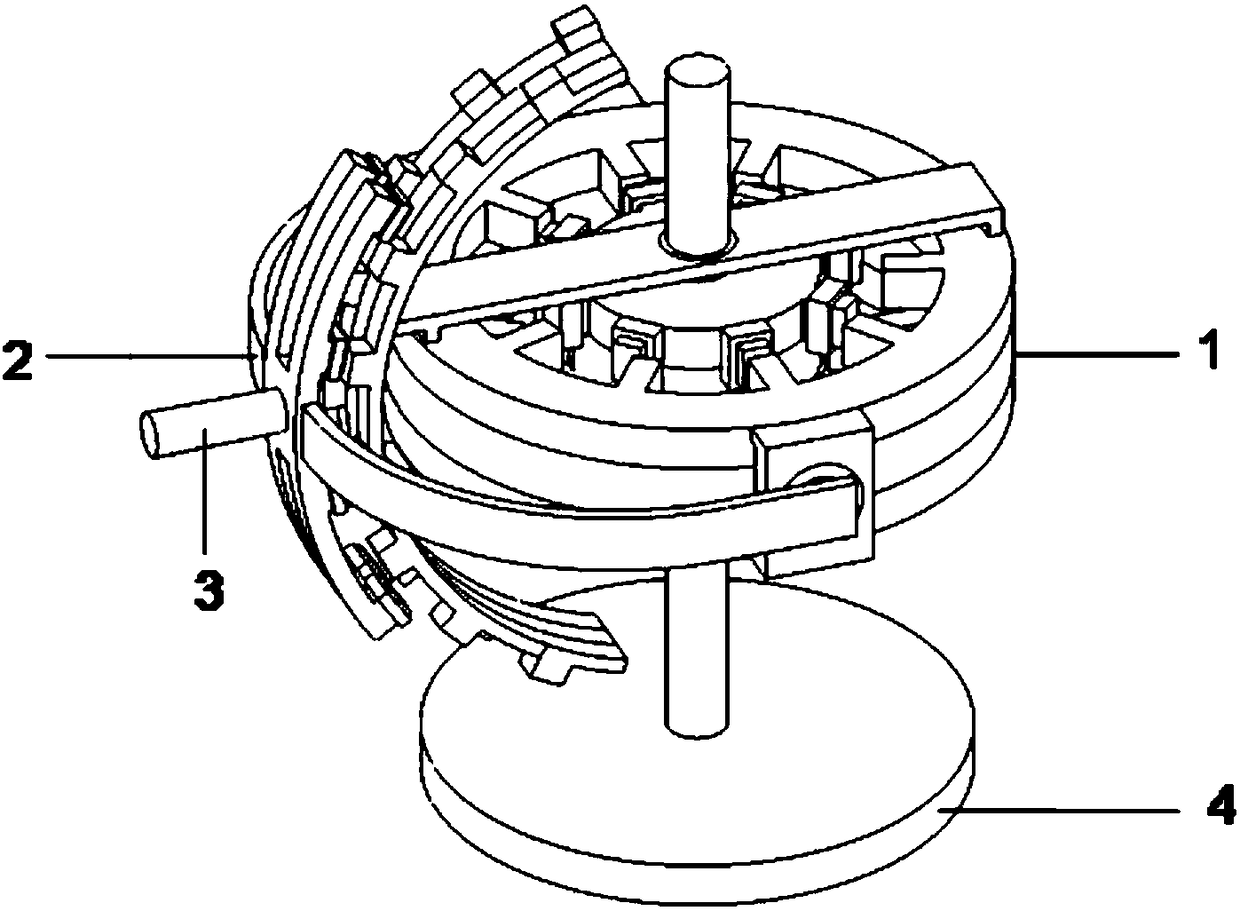
[0068] The first object of the present invention is to provide a non-spherical orthogonal structure two-degree-of-freedom hybrid stepper motor, such as Figure 4 As shown, the non-spherical orthogonal structure two-degree-of-freedom hybrid stepping motor includes the first degree of freedom motor 1, the second degree of freedom motor 2, the output shaft 3 and the base 4, and the two degrees of freedom motors are inner rotor motors. Including the rotor part, the stator part, the stator end cover, and the rotating shaft; the structure principle of the rotor part of the two degrees of freedom motors is the same, including the permanent magnet and the two-stage laminated rotor core on both sides, and a number of small teeth are evenly arranged on the outside of the rotor core , the small teeth on the two rotor cores are staggered by 1 / 2 pitch; the stator part of the two-degree-of-freedom motor includes a laminated stator core and stator windings, and magnetic poles are evenly distr...
Embodiment 2
[0094] The second object of the present invention is to provide a working method of a non-spherical orthogonal structure two-degree-of-freedom hybrid stepping motor, including: a single motor works alone and two motors work together;
[0095] When a single motor works alone, the stator winding of the first degree of freedom motor is energized in a certain order, the first degree of freedom motor works in the state of a hybrid stepping motor, and the rotor part of the first degree of freedom motor drives the shaft and the second degree of freedom The motor rotates around the X-axis as a whole, so that the output shaft can swing around the X-axis; or
[0096] The stator winding of the second degree of freedom motor is energized in a certain order, and the second degree of freedom motor works in the state of a hybrid stepping motor. The rotor part of the second degree of freedom motor drives the rotating shaft to rotate around the Y axis, so that the output shaft realizes the dire...
Embodiment 3
[0099] The third object of the present invention is to provide a robot with multiple degrees of freedom of motion, which includes the non-spherical orthogonal structure two-degree-of-freedom hybrid stepping motor. Other structures of the robot with multiple degrees of freedom of motion are the same as the existing structures, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More