

Hypersonic aerocraft tracking control method with interference observer
A disturbance observer and hypersonic technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as unproven observer, boundedness, etc., achieve fast convergence rate, weaken system chattering, Easy to design effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Specific embodiment one: a hypersonic vehicle tracking control method including disturbance observer comprises the following steps:
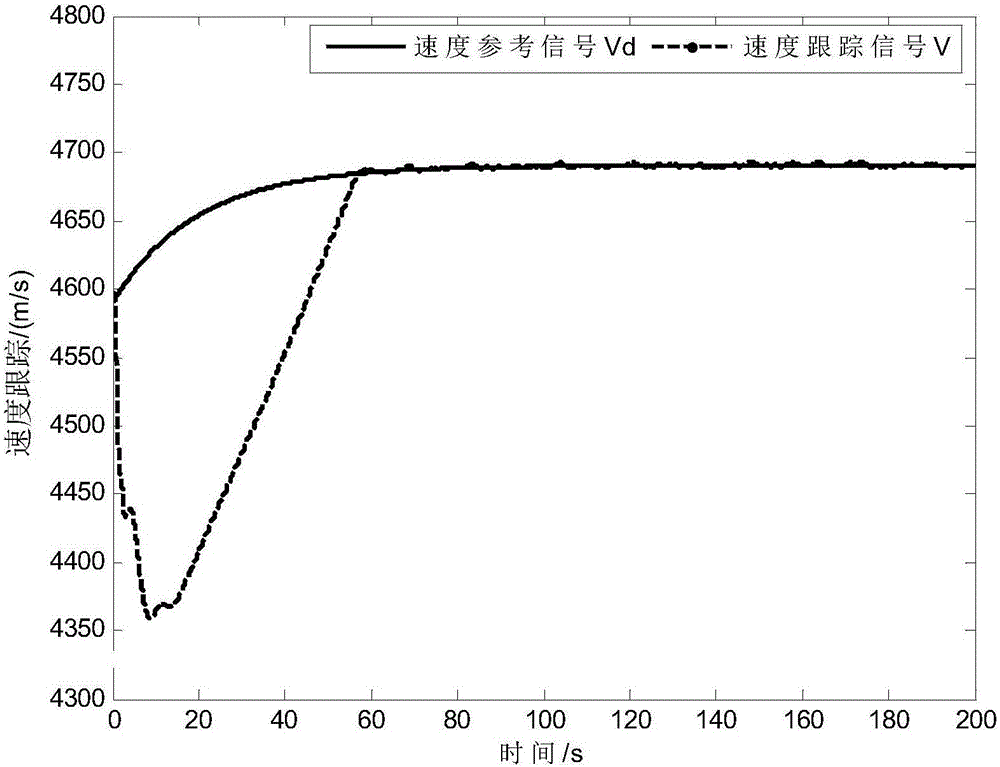
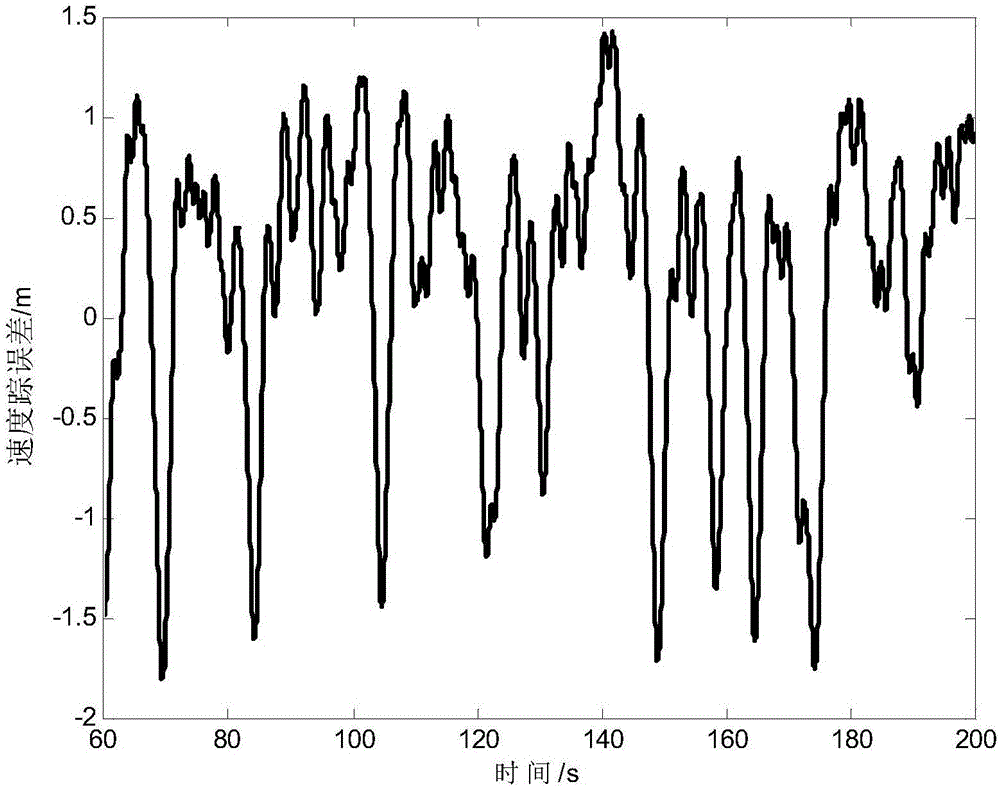
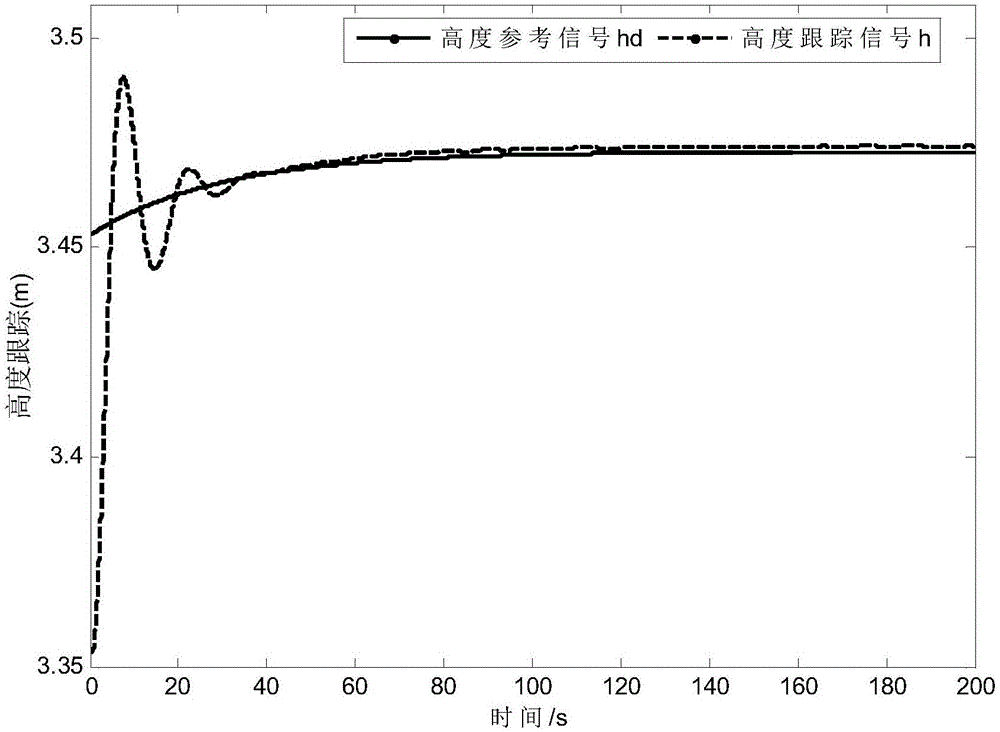
[0025] Firstly, the longitudinal input and output linearization model of the hypersonic vehicle is given, and on this basis, the second-order system model with system disturbance is established. Secondly, based on the proposed fast non-singular terminal sliding mode, based on NHDO to effectively estimate the system disturbance, a finite-time terminal sliding mode controller is designed to realize the fast and stable tracking control of the hypersonic vehicle. Finally, the theoretical proof of the stability of the entire closed-loop system is given by using the Lyapunov stability theory to ensure that the system state is bounded in the NHDO convergence stage, and a digital simulation of the hypersonic longitudinal nonlinear model is carried out to further verify the designed The effectiveness of the controller.
[0026] Step 1: According to...
specific Embodiment approach 2
[0029] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the specific process of establishing a second-order system model with system disturbance in Step 1 is as follows:
[0030] Select the National Aeronautics and Space Administration blueprint given in the literature (Bolender M A, Doman D B. Nonlinear longitudinal dynamical model of an air-breathing hypersonic vehicle [J]. Journal of Spacecraft and Rockets, 2007, 44(2): 374-387). The rigid hypersonic vehicle model proposed by the Lee Research Center is as follows:
[0031]
[0032]
[0033]
[0034]
[0035]
[0036] Where V is the flight speed, h is the flight altitude, α is the flight angle of attack, θ is the flight pitch angle, q is the pitch angle rate, φ is the engine throttle and is the first derivative of the throttle valve; μ is the gravitational constant of the earth, r=h+R E , R E is the radius of the earth, γ=θ-α is the track angle, M is the control moment, I yy is...
specific Embodiment approach 3
[0065] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the specific process of designing a limited-time terminal sliding mode controller in step 2 is as follows:
[0066] NHDO is used to effectively estimate the compound disturbances caused by external disturbances and uncertainties in the system. On this basis, the controller is designed based on the finite-time sliding mode control theory. It can ensure that the sliding mode surface of the system is stable in a finite time, and the output tracking error signal is asymptotically stable.
[0067] Nonhomogeneous Disturbance Observer (NHDO)
[0068] Consider a first-order single-input single-output (SISO) nonlinear system
[0069]
[0070] Among them, x represents the state of the system, and its solution is the solution in the sense of Filippov, u∈R is the continuous control input, d is the fully smooth uncertain function and m-1 differentiable, d m-1 has a known Lipschitz constant L. De...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More