Wireless electroencephalogram-based control system for controlling crawler type mobile robot
A mobile robot and control system technology, applied in the control/regulation system, non-electric variable control, vehicle position/route/height control, etc., can solve the problem of equipment usage scenarios that affect the tester's range of activities, and it is inconvenient to observe external movements in real time. The equipment can make feedback control and other issues at any time to achieve the effect of improving exercise execution ability, reducing brain wave electrodes, and reducing difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
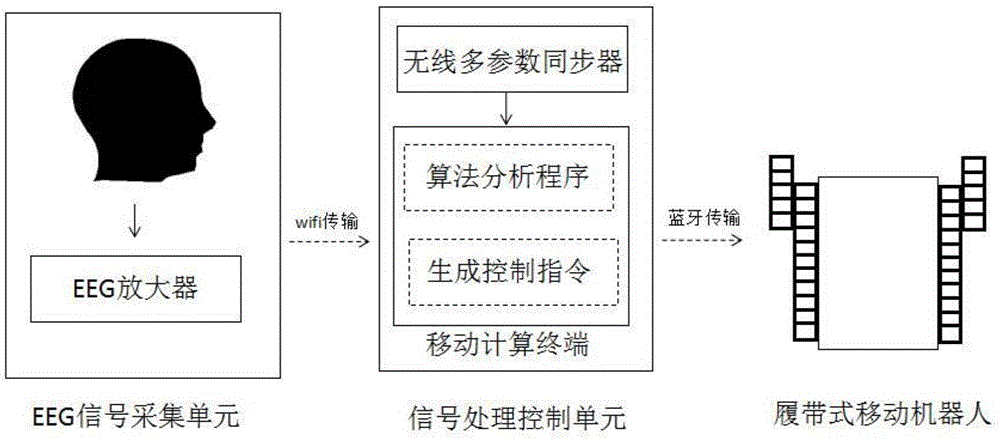
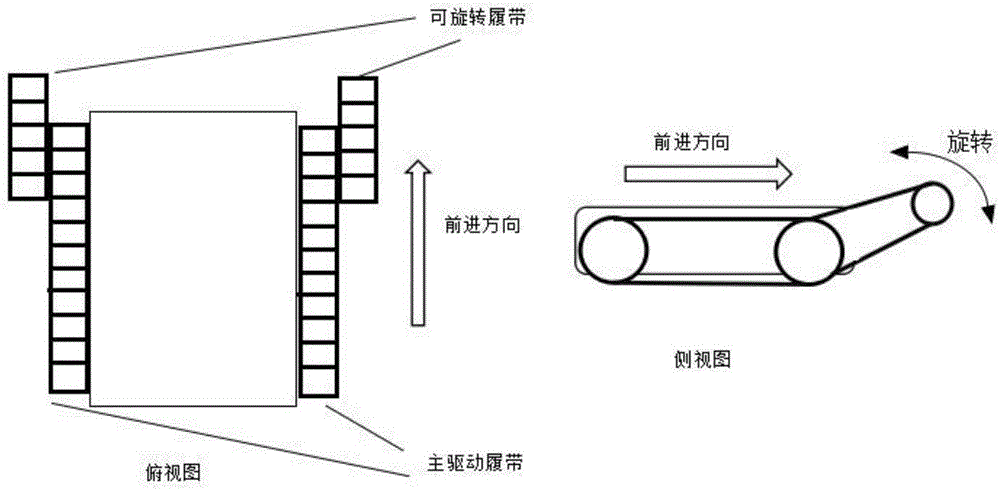
[0019] The invention discloses a control system for controlling a crawler mobile robot based on wireless brain electricity. The system includes an EEG signal acquisition unit, a signal processing control unit and a crawler mobile robot. The EEG signal acquisition unit includes an 8-lead EEG cap and an EEG amplifier. The signal processing control unit includes a wireless multi-parameter synchronizer and a mobile computing terminal. Control the start and stop, turn left and right, and the rotation of the front wheel rotatable track of the tracked mobile robot by imagining the movement combination of the left and right hands and the left and right feet. The invention can be used for remote real-time ground environment detection, and can overcome relatively complicated ground environment. In addition, because the present invention can recognize the motor imagery of four...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com