

VR (Virtual Reality) system tactile glove device and implementation method thereof
A glove device and tactile technology, applied in the field of force-tactile interaction, can solve the problems of large volume and weight, bulky volume, inconvenience to carry, etc., and achieve the effect of good portability and simple control principle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
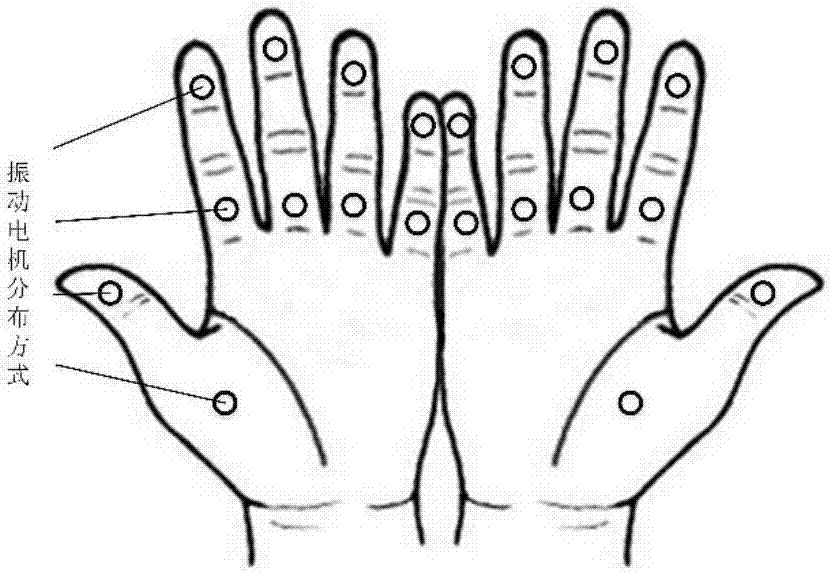
[0019] The glove hardware device includes a glove main body and a control box thereof. The arrangement of the motors on the tactile glove is as follows: figure 1 As shown, there are 10 linear vibration motors arranged on a single glove, arranged according to two motors for each finger, and the vibration motors are numbered, and the corresponding serial numbers are used to indicate and control the motors of each part. The linear motor of this glove It is a spring mass that moves in the form of linear motion. Its advantage is that it has a sense of direction during the motion and has a smaller area. When in use, the user wears a glove control box on his arm. The control box includes a central control module, a motor drive module, a wireless Bluetooth module, and a power supply component. The microprocessor of the central control module can perform high-speed processing of tactile-related information. According to the instructions of the microcontroller, a voltage signal of a sp...
specific Embodiment 2
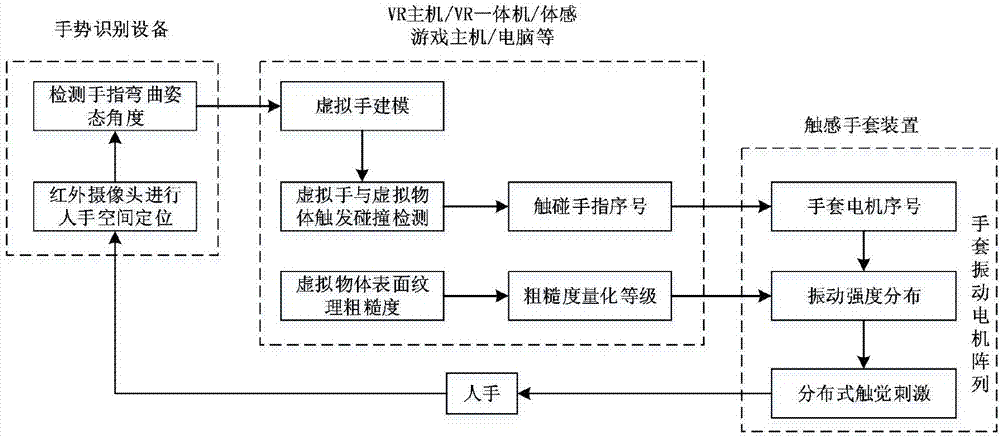
[0021] figure 2 System block diagram showing the tactile reproduction method of gloves. After wearing gloves, the user places both hands within the detectable range of the gesture recognition device. The gesture recognition device spatially locates the hand through the infrared camera and detects the bending angle of the finger, and transmits this information to VR. host. The unity engine software of the VR host models the information transmitted by the gesture input device to generate a virtual hand model. The virtual hand moves with the user's hand. When the virtual hand collides with an object in the virtual environment, a collision detection is triggered to record the serial number of the colliding finger. and the surface texture roughness of the virtual object. The VR host wirelessly transmits the collision information to the microcontroller of the tactile glove through Bluetooth communication, and the microcontroller generates waveforms with specific voltage amplitudes...
specific Embodiment 3
[0024] In the "Fruit Ninja" somatosensory game, players need to use their arms to simulate katana in the current game. The gesture recognition device (Kinect) detects the player's hand movements and inputs them to the game console. Fly the fruits to get high score. But the player can't feel the real sense of touch and the shape of the fruit when touching the fruit, but with the present invention, after the user wears the tactile glove, when the virtual hand (samurai sword) in the game touches the virtual fruit, the game console sends micro-control to the glove. The controller sends the collision information, and the glove microcontroller maps the motor serial number according to the contact position between the virtual hand and the virtual fruit, calculates the amplitude and frequency of the mapped linear motor drive voltage based on the roughness of the fruit surface texture, and finally realizes the tactile sensation through motor vibration Real reproduction.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More