Pressure self-balance type electromechanical servo action device under high-pressure environment
A self-balancing, high-voltage environment technology, applied in the field of servo control systems and electric servo actuators, can solve the problems of inability to meet the power-to-weight ratio, large volume and weight, and small installation space, reducing manufacturing costs and improving Power-to-weight ratio, better effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0028] The purpose of the present invention is to overcome the deficiencies in the prior art, and provide a pressure self-balancing electromechanical servo actuating device under high pressure environment with high power-to-weight ratio and strong bearing capacity.
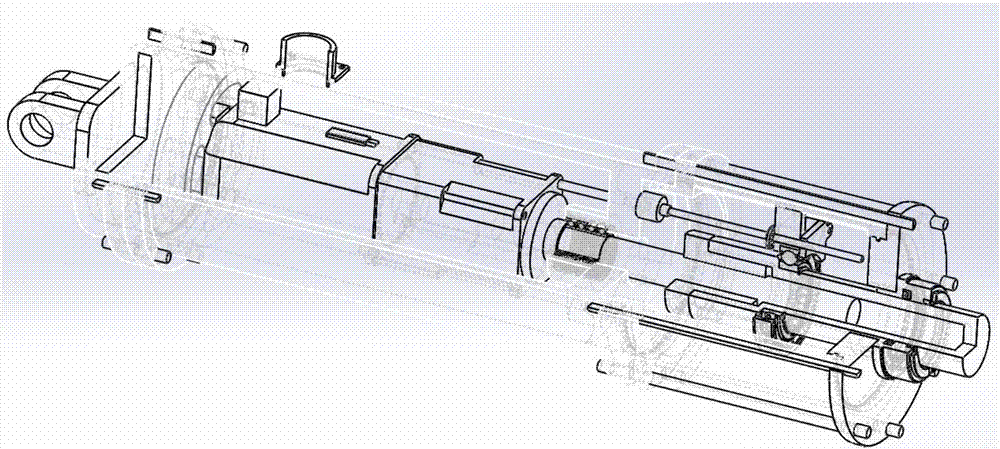
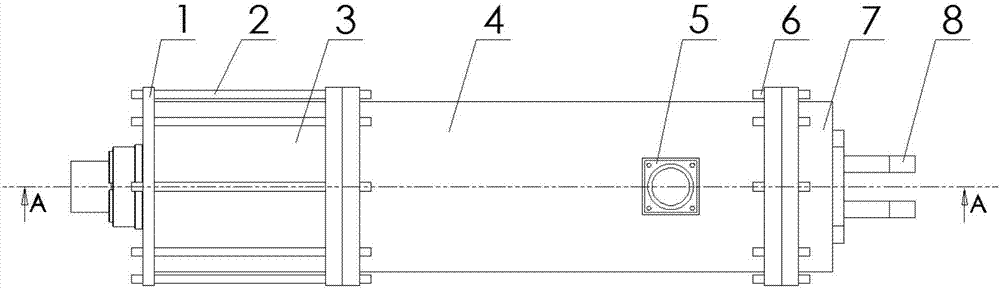
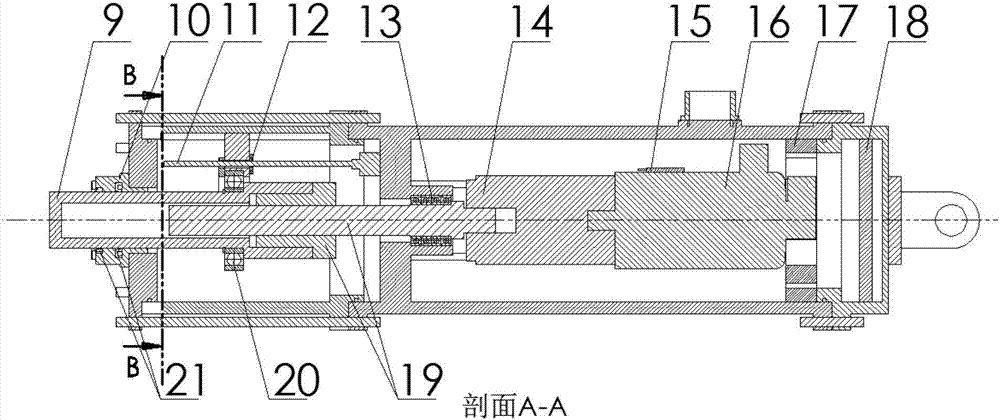
[0029] refer to figure 2 , 3 , 4, 5, a pressure self-balancing electromechanical servo actuator in a high-pressure environment, including: a front cover (1); a front stud (2); a front casing (3); a main casing (4); Plug (5); rear stud (6); piston cylinder (7); trunnion (8); output rod (9); copper sleeve (10); linear displacement sensor (11); magnetic ring (12); Angular contact ball bearing (13); reducer (14); temperature sensor (15); servo motor (16); support block (17); piston (18); nut (19-1); lead screw (19-2 ); deep groove ball bearing (20); high and low lip seal (21); guide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More