

A sliding mode control method for electro-hydraulic servo system
A technology of electro-hydraulic servo system and control method, which is applied in the testing of fluid pressure actuation system, components of fluid pressure actuating system, electric digital data processing, etc. , sliding mode controller chattering and other problems, to achieve the effect of weakening chattering phenomenon, improving dynamic response characteristics, and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
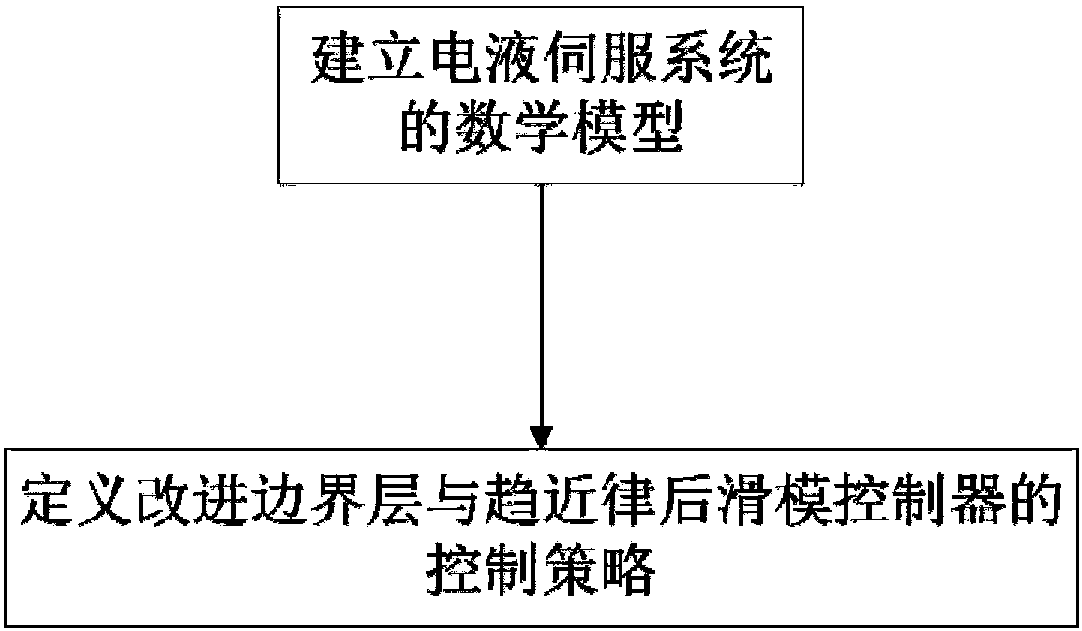
[0018] please see figure 1 , the sliding mode control method of a kind of electro-hydraulic servo system provided by the present invention, comprises the following steps:
[0019] Step 1, establishing a mathematical model of the electro-hydraulic servo system;
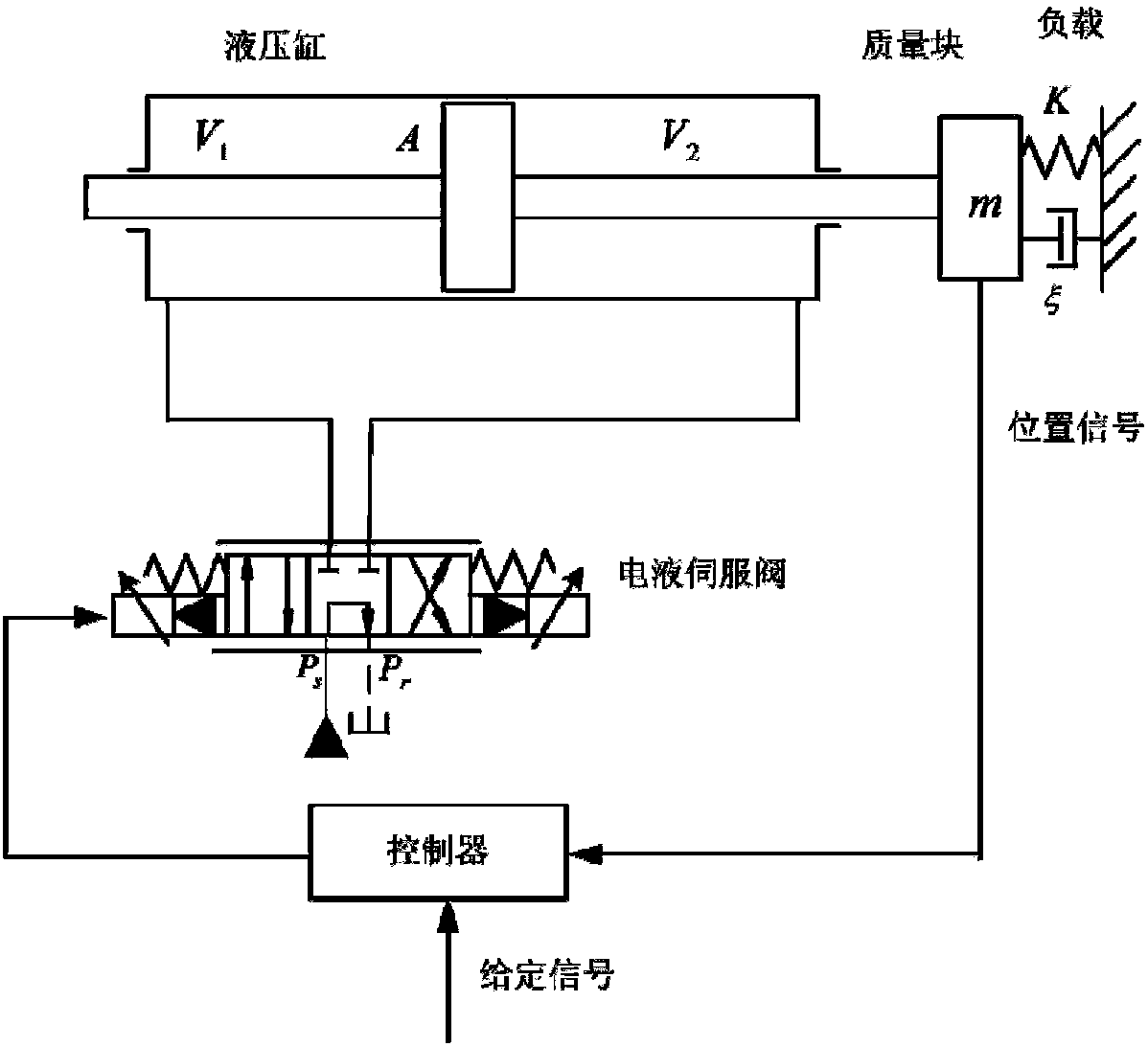
[0020] like figure 2 On the left is a schematic diagram of the electro-hydraulic servo system as a double-piston-rod hydraulic cylinder controlled by an electro-hydraulic servo valve. figure 2 On the right is a load schematic diagram of the hydraulic cylinder mass block acting on the elastic load...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More