Offshore crane heave compensation control system and method using video rangefinding
A heave compensation and offshore platform technology, applied in the field of machinery, can solve problems that are difficult to achieve, high in cost, and dependent on compensation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
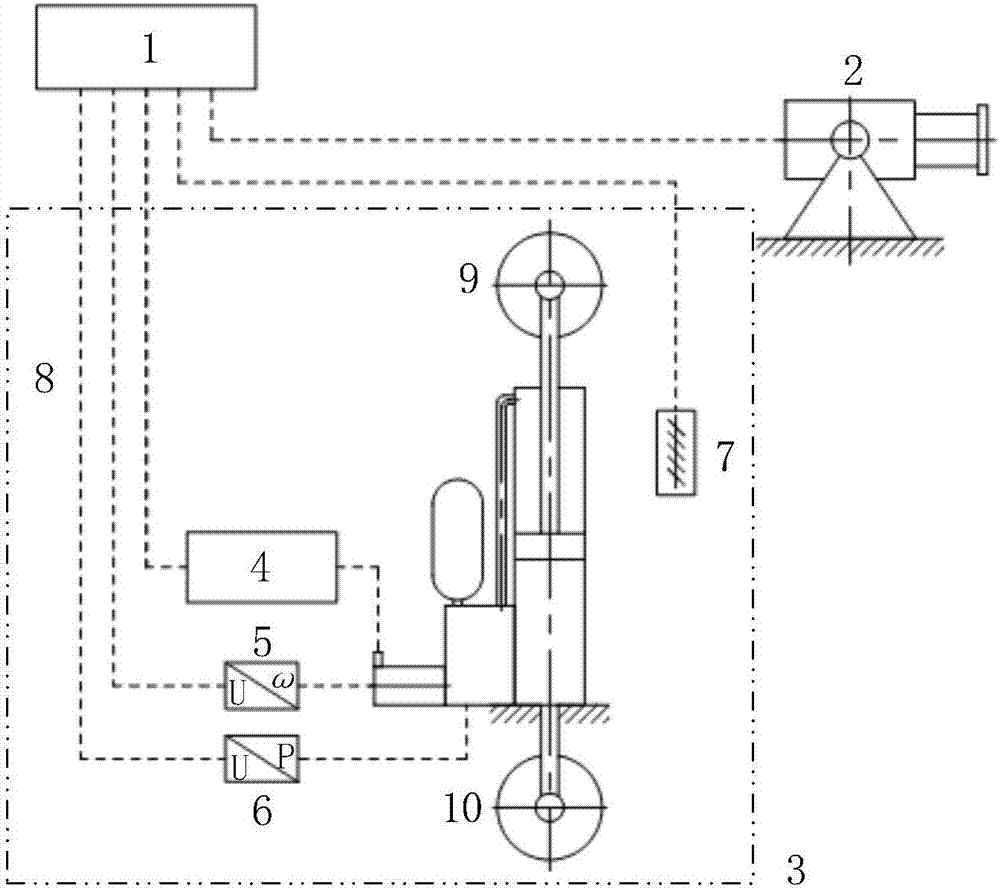
[0062] Such as figure 1 As shown, the heave compensation control system of the offshore platform crane using video ranging according to the present invention includes a control computer 1, an industrial camera 2 and a direct pump-controlled electro-hydraulic heave compensation device 3; an industrial camera 2 and a direct pump-controlled The servo motor driver 4, the speed sensor 5, the three pressure sensors 6 and the built-in displacement sensor 7 in the electro-hydraulic heave compensation device 3 are respectively connected to the control computer 1 through the electrical wiring 8 to exchange information and energy; the industrial camera 2 and the direct pump-controlled electro-hydraulic heave compensation device 3 are respectively installed on the base of the offshore platform crane.
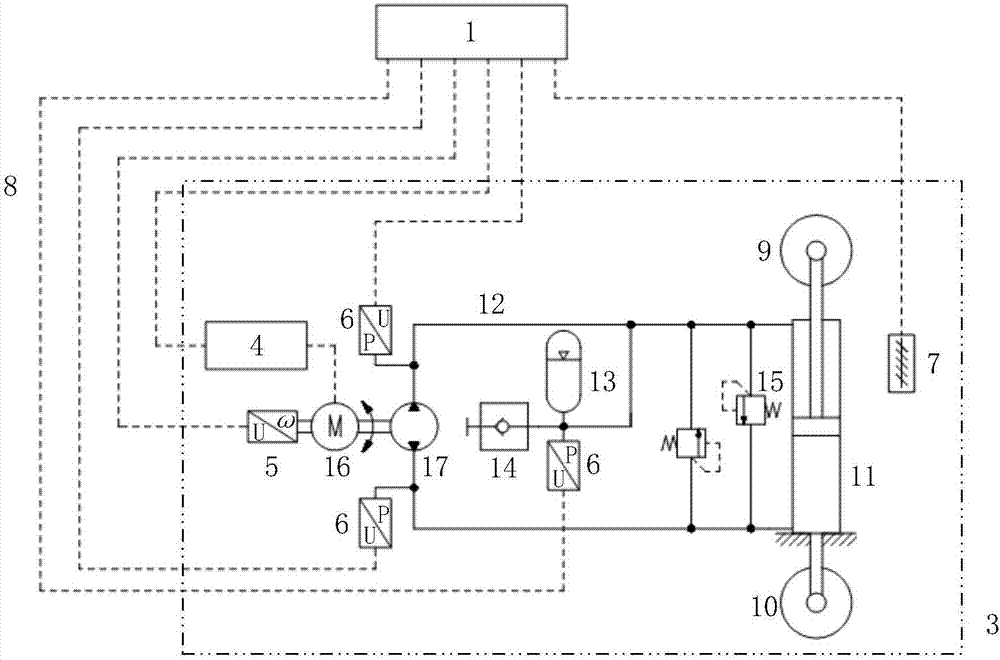
[0063] Such as figure 2 As shown, the first embodiment of the direct pump-controlled electro-hydraulic heave compensation device 3 of the present invention includes a servo motor driver 4...
Embodiment 2
[0071] The present invention provides the direct pump-controlled electro-hydraulic heave compensation device for the heave compensation control system of the offshore platform crane using video ranging, and the direct pump-controlled electro-hydraulic heave compensation device 3 is used as the offshore platform The executive mechanism of the crane heave compensation control system, the direct pump-controlled electro-hydraulic heave compensation device 3 includes a servo motor driver 4, a servo motor 16, a two-way hydraulic pump 17, an accumulator 13, a quick-plug connector 14, two A relief valve 15, a single rod hydraulic cylinder 11, a movable pulley 9, a static pulley 10, at least three pressure sensors 6, a rotational speed sensor 5 and a displacement sensor 7, the servo motor 16 driven by the servo motor driver 4 drives the two-way hydraulic pump 17 to rotate , the two output ends of the two-way hydraulic pump 17 are respectively connected with the rod cavity and the rodles...
Embodiment 3
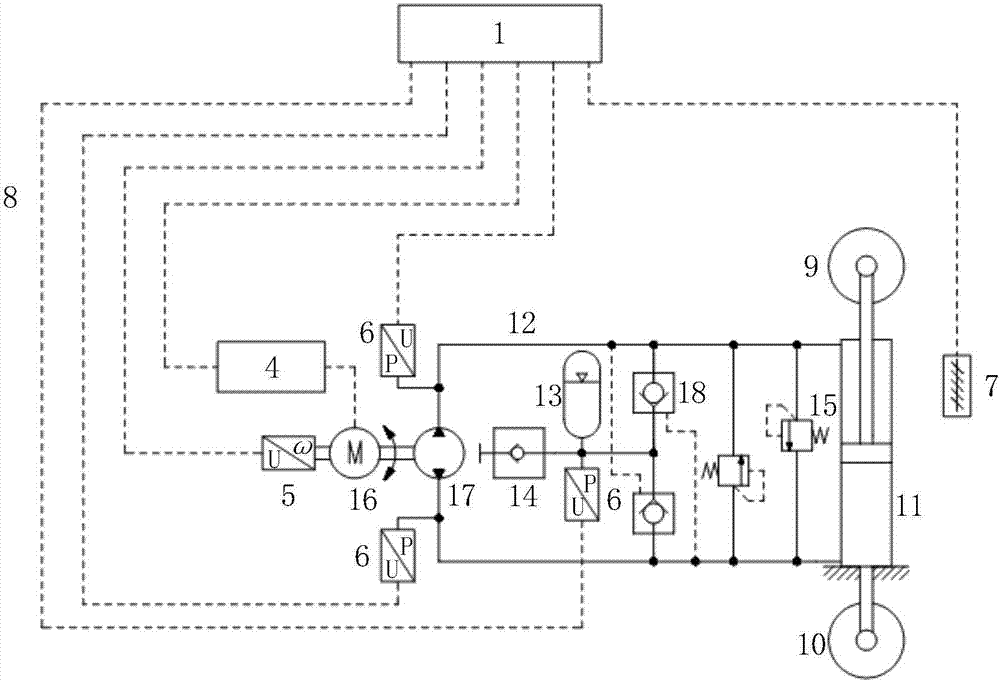
[0082] Such as image 3 Shown is the second embodiment of the direct pump-controlled electro-hydraulic heave compensation device 3 of the present invention, including a control computer 1, a servo motor driver 4, a servo motor 16, a bidirectional hydraulic pump 17, an accumulator 13, Push-in connector 14, two overflow valves 15, single rod hydraulic cylinder 11, movable pulley 9, static pulley 10, three pressure sensors 6, rotational speed sensor 5, built-in displacement sensor 7, hydraulic pipeline 12, electrical connection 8 And two hydraulic control one-way valves 18. Its basic principle is as figure 2 The shown embodiment 1 is the same, and the direct pump-controlled electro-hydraulic heave compensation device 3 can bear negative load through two hydraulically controlled one-way valves 18 . The negative load mentioned above means that the load drives the piston rod of the hydraulic cylinder to move. image 3 In the above, the negative load refers to that the hydraulic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com