

Robot joint tail end residual vibration restraining method based on input shaper
A robot joint and input shaping technology, applied in manipulators, manufacturing tools, etc., can solve problems affecting the vibration suppression effect of the input shaper, system output time lag, etc., to reduce system time lag, enhance robustness, and reduce sensitivity degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
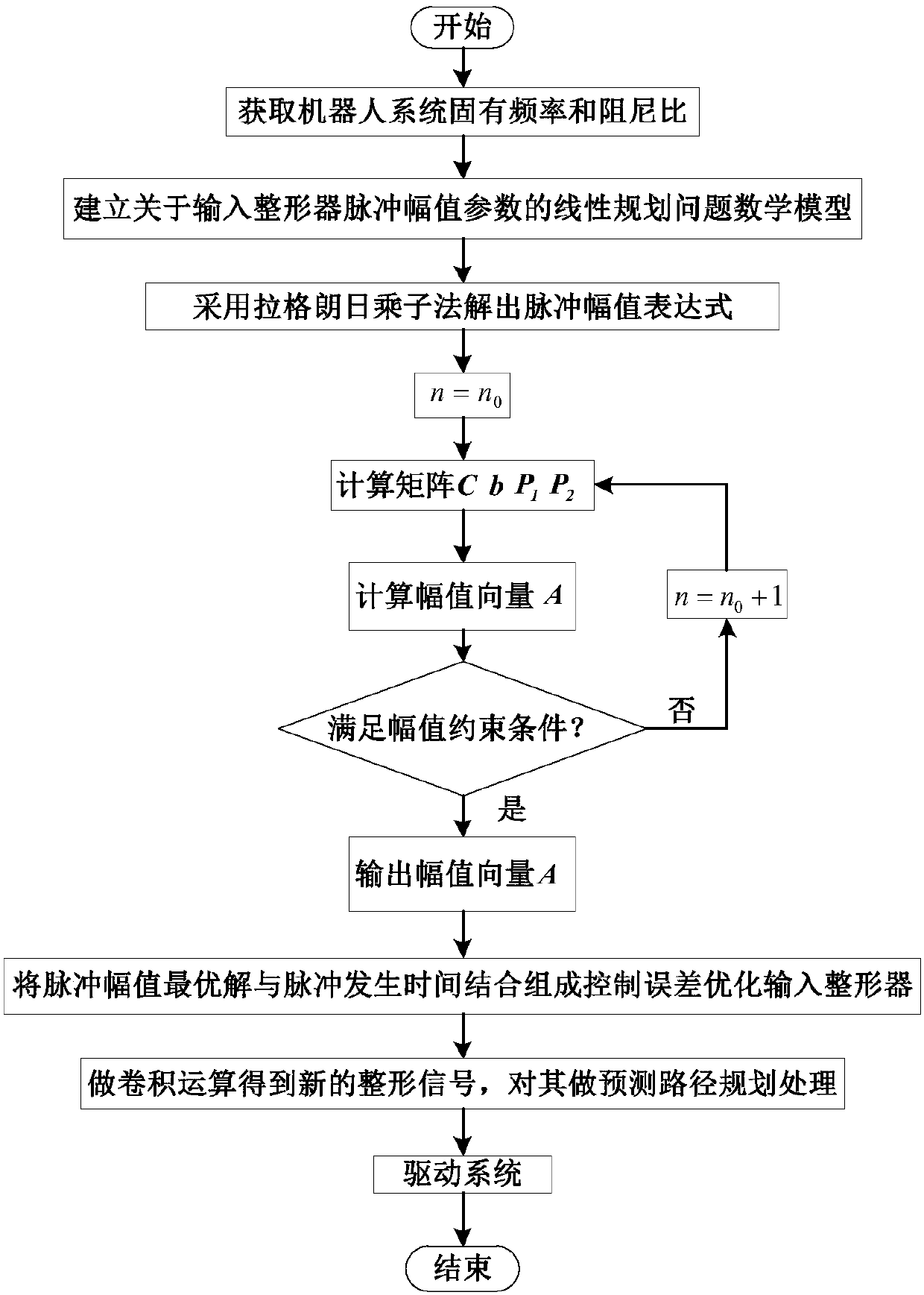
[0062] Such as figure 1 As shown, a method for suppressing residual vibration at the end of a robot joint based on an input shaper includes the following steps:
[0063] Step 1: Obtain the undamped natural frequency ω of the robot system 0 and damping ratio ζ;
[0064] Step 2: establishing a linear programming problem mathematical model about the input shaper pulse amplitude parameter;
[0065] Step 3: use the Lagrange multiplier method to solve the pulse amplitude expression, and iteratively obtain the optimal solution of the pulse amplitude;
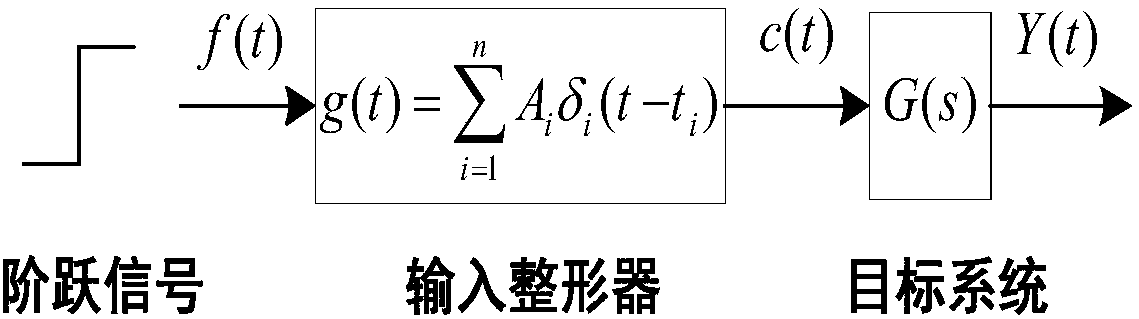
[0066] Step 4: Combining the optimal solution of the pulse amplitude with the pulse generation time to form a control error optimization input shaper;
[0067] Step 5: Input the reference signal and control error optimization into the shaper to perform convolution operation to obtain a new shaping signal, and then use the signal to drive the system to suppress the residual vibration at the end of the robot (see figure 2 ).
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More