

A bionic human hand multifunctional quadrotor aircraft
A quad-rotor aircraft, multi-functional technology, applied in the field of aircraft, can solve the problems of limiting the use time of the drone, affecting the flight of the aircraft, and low accuracy, so as to improve work safety and reliability, improve the shock absorption effect, grasp Get the exact effect of an object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
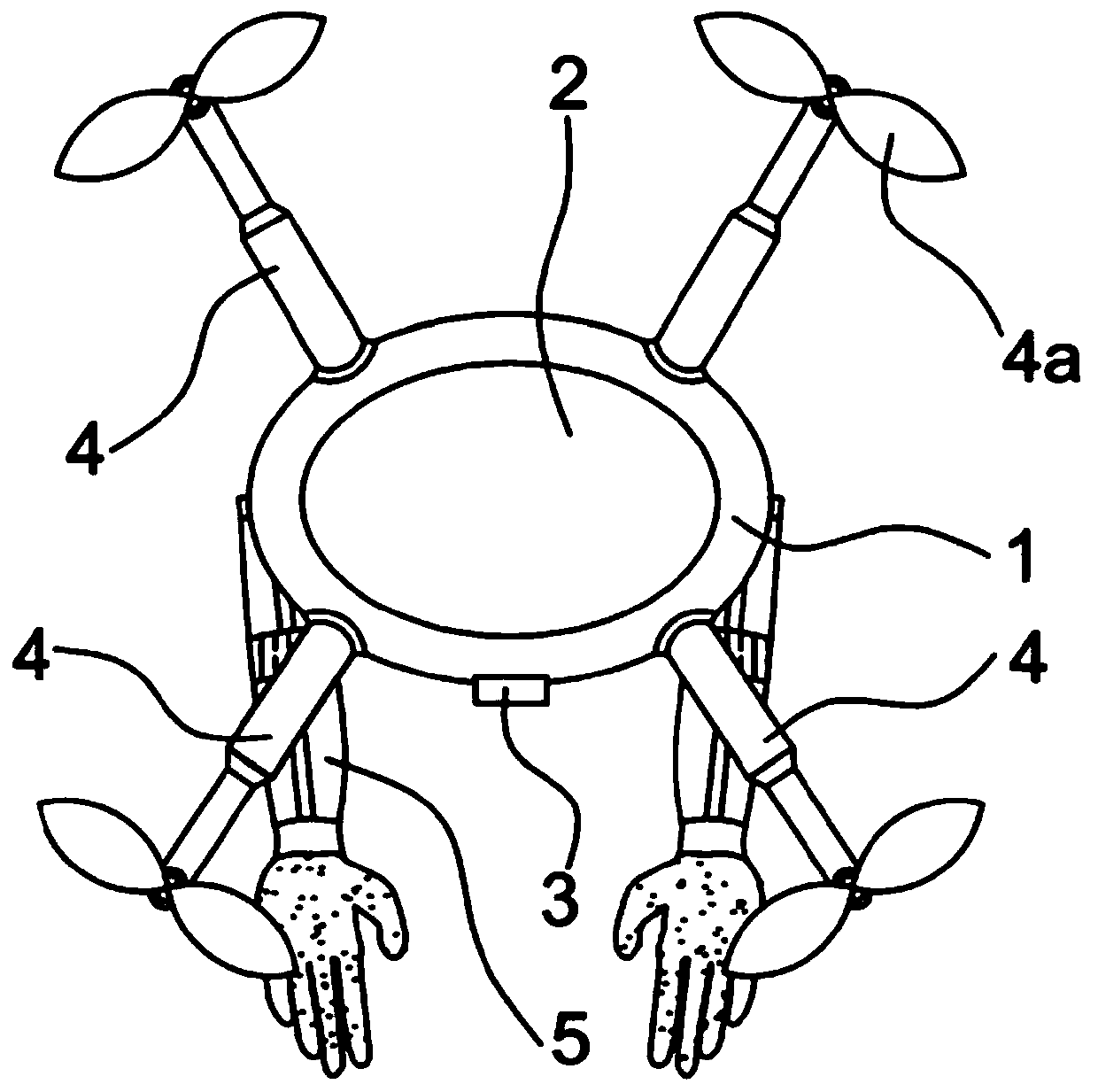
[0034] Such as figure 1 , 5 As shown, a bionic human-handed multifunctional quadrotor aircraft includes a flying frame 1, four rotors 4 are evenly connected around the flying frame 1, a solar panel 2 is connected to the inner side of the flying frame 1, and a miniature camera 3 is connected to the side of the flying frame 1 , the lower end of the flying frame 1 is connected with a manipulator 5 through a hydraulic spring shock absorber 6 . The flight frame 1 is the basic structural foundation of the aircraft, which can support aircraft components, stably connect them, and improve the anti-interference ability of the aircraft. The rotor 4 changes the rotation speed of the rotor 4 through the motor speed to realize the change of the lift force, thereby controlling the change of the attitude and position of the aircraft and ensuring the flexible operation of the aircraft. Retrieval of objects proceeds normally. The solar panel 2 utilizes solar semiconductor electronic devices ...
Embodiment 2
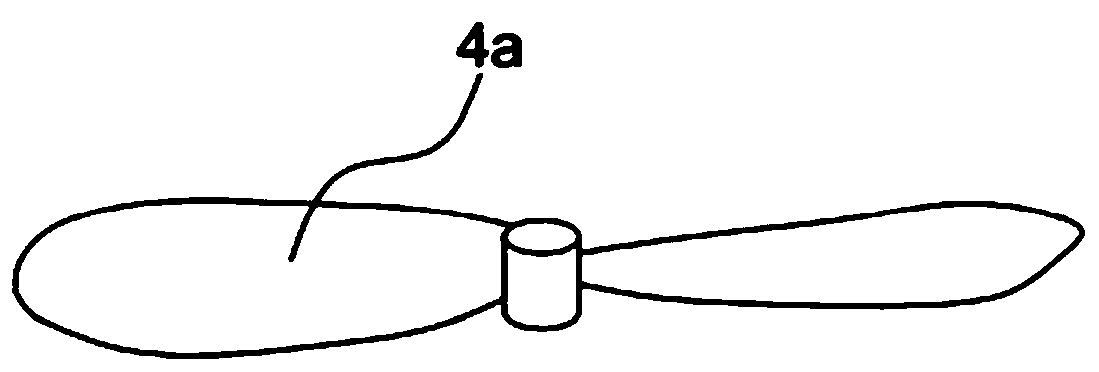
[0037] Such as Figure 1-9 As shown, on the basis of Embodiment 1, the present embodiment is further optimized as follows: the rotor 4 is connected to an independent motor, the head end of the rotor 4 is connected to the blade 4a, and the inclination angle of the blade 4a is preferably 6°. The four rotors 4 of the aircraft are respectively connected with the motors, and the adjacent motors control the blades 4a on the rotors 4 to rotate in reverse, so when the aircraft is in balanced flight, the gyro effect and the aerodynamic torque effect are all canceled out, and the blades 4a The setting of the inclination angle is conducive to forming a suitable pressure difference between the upper and lower sides of the blade 4a, so that the aircraft can achieve stable flight while having greater lift, which is the optimal inclination angle.
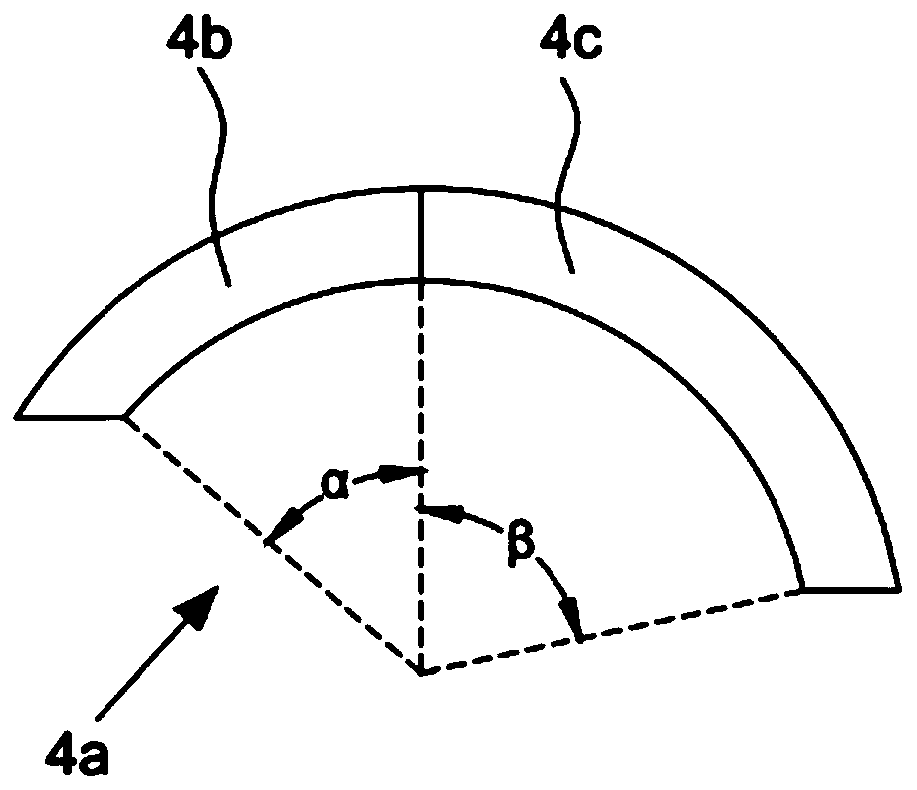
[0038] The paddle 4a is composed of an arc-shaped left paddle 4b and an arc-shaped right paddle 4c. The central angle α:β ratio of the left paddl...
Embodiment 3
[0047] Such as Figure 10 As shown, it is a flow chart of the action of the solar panel 2 on the aircraft of the present invention: the solar panel 2 uses a solar converter to generate a photoelectric effect, converts solar radiation energy into electrical energy, and supplies it to the motor of the aircraft, and the motor drives the aircraft wing to rotate, thereby realizing Long-term self-sufficiency power supply for quadrotor aircraft.
[0048] Such as Figure 11 As shown, among the four rotors 4 of the quadrotor aircraft of the present invention, the rotor F1 and the rotor F3 rotate clockwise, the rotor F2 and the rotor F4 rotate counterclockwise, the four rotors 4 are arranged in a cross, and the adjacent rotors rotate in the opposite direction , so that the quadrotor aircraft counteracts the gyroscopic effect of the aircraft, an underactuated system, is a vertical lift with six degrees of freedom, four input forces, and six state outputs.
[0049] Such as Figure 12 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More