

Method for controlling slip mode variable structure of brushless direct current motor based on power exponential reaching law
A technology of brushed DC motor and sliding mode variable structure, which is applied in the direction of AC motor control, single motor speed/torque control, control system, etc., and can solve the problems of jitter response speed and undiscovered problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
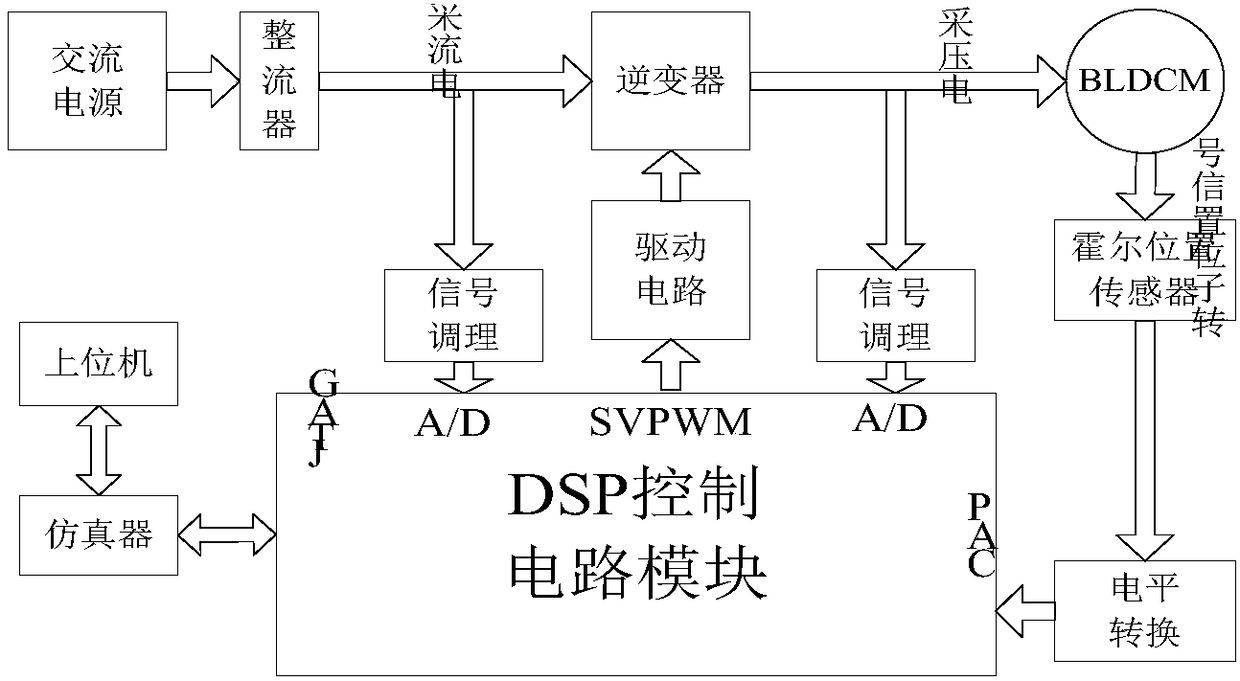
[0116] This embodiment provides a sliding mode variable structure control method for a brushless DC motor based on a power exponent approach rate. This embodiment is a brushless DC motor speed servo system (governing system) based on DSP design, mainly by brushless DC motor, integrated power drive board, DSP TMS320F28335 evaluation board (ie DSP control circuit module), DSP emulator, programming The software is composed of CCS5.5, and its system composition is as follows figure 1 shown.
[0117] The specific device model and features are described as follows:
[0118] (1) Brushless DC motor
[0119] The model of the brushless DC motor is 57BLF01, the specific parameters: number of magnetic poles: 8; number of phases: 3; rated voltage: 24V; rated speed: 3000rpm; holding torque: 0.2N-m; output power: 63W; peak torque: 0.6N-m; Peak current: 9.6A; Line resistance: 0.6Ω; Line inductance: 0.75mH; Torque constant: 0.065N-m / A; Back EMF 6.23V / kprm; Moment of inertia: 120g cm 2 .
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More