

Stacked workpiece posture recognizing and picking method based on RGBD camera
A RGB image and workpiece technology, applied in the field of intelligent robots, can solve the problems of high price, error influence, difficulty in adapting, etc., and achieve the effects of fast posture positioning and grasping, high adaptability and migration, and strong anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
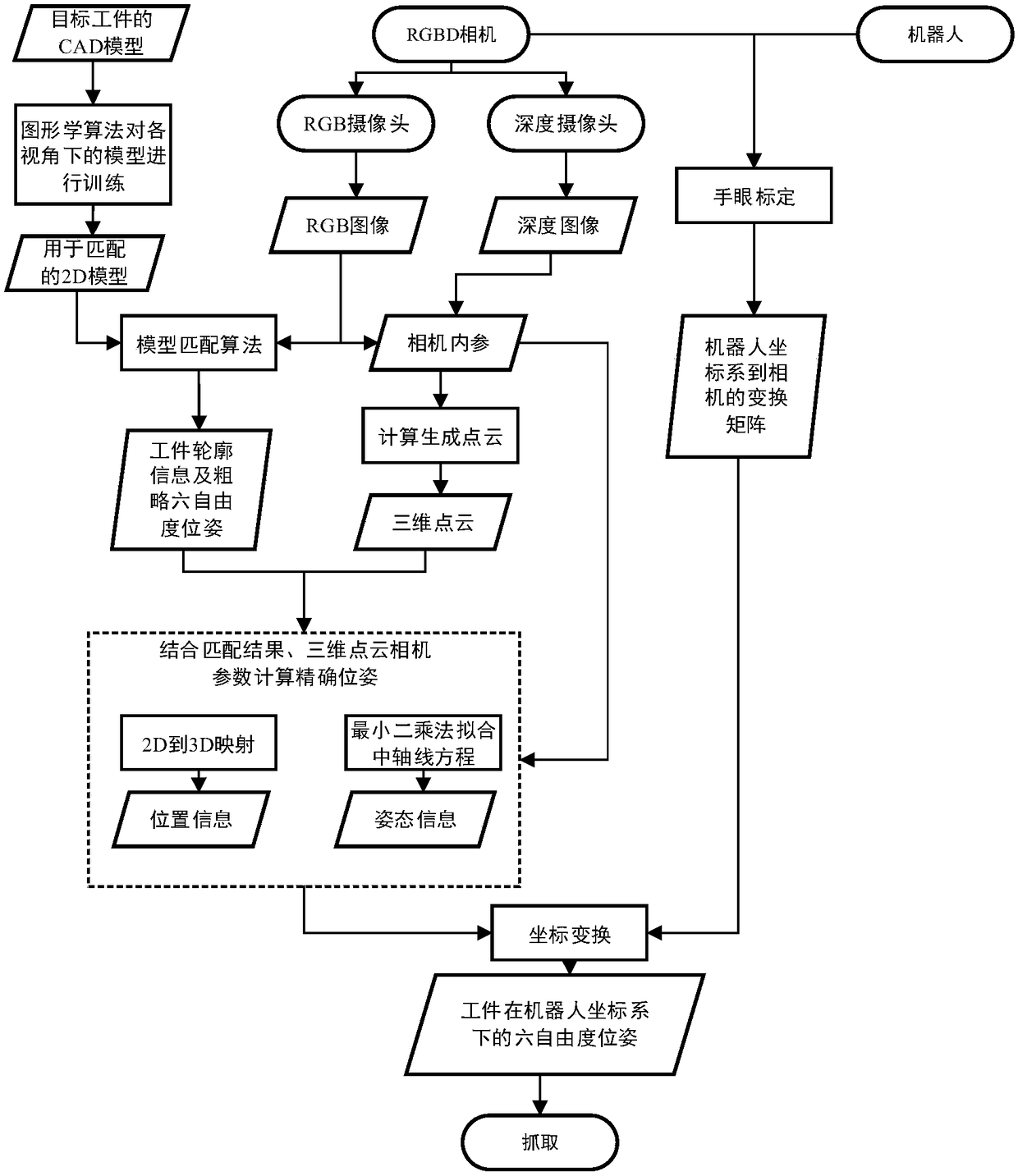
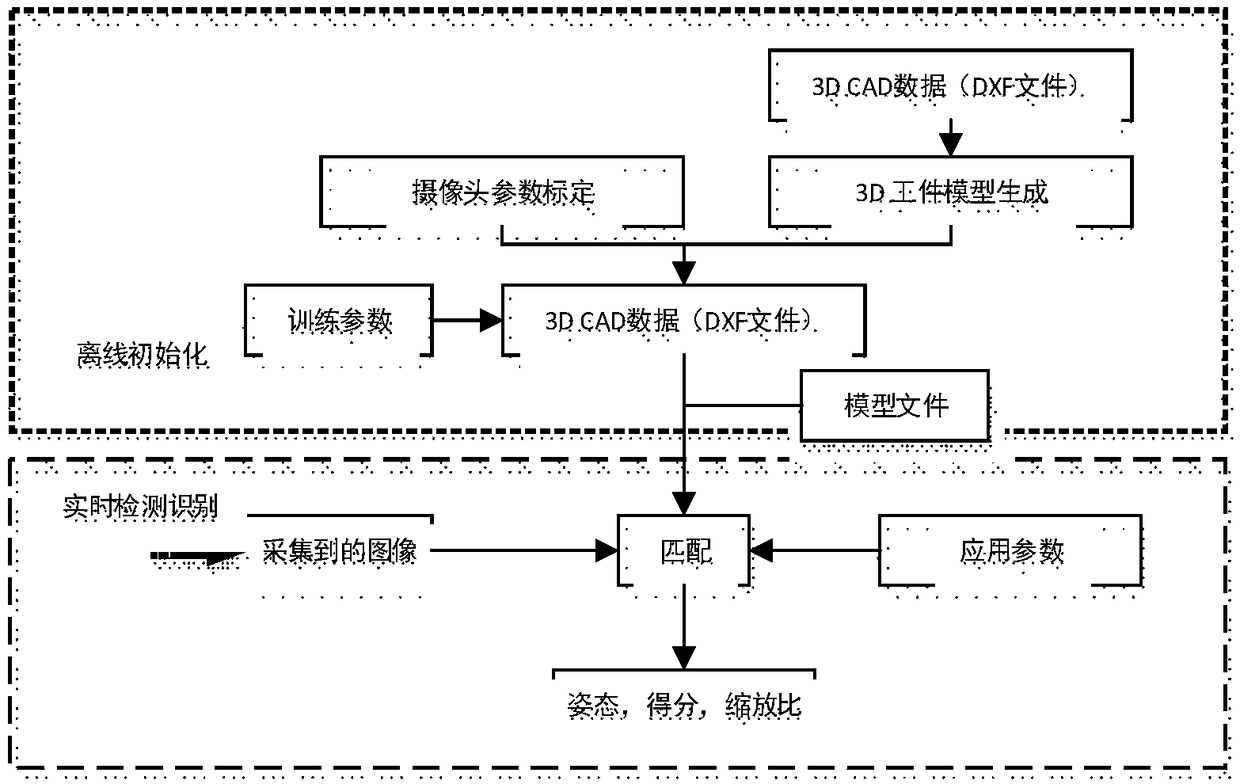
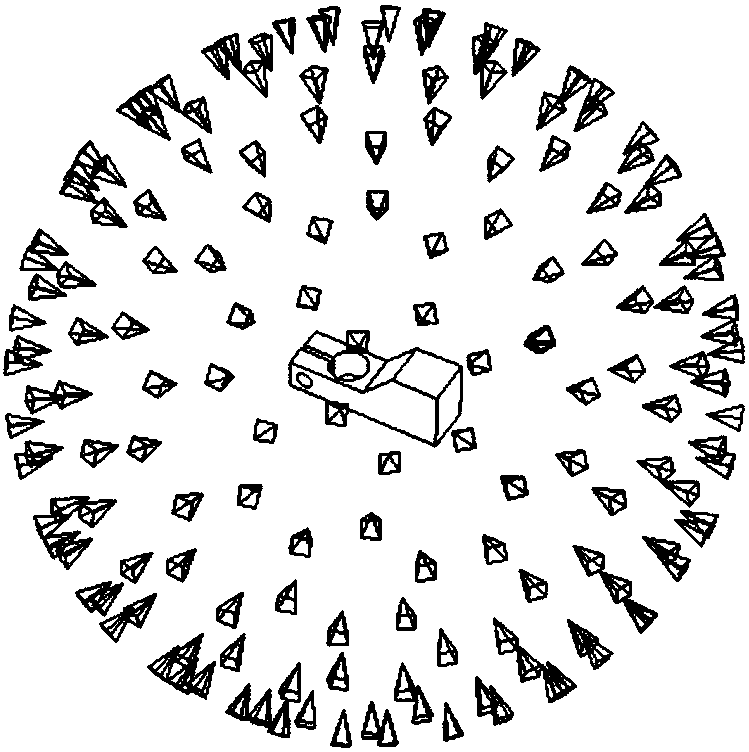
[0051] In view of the above problems and requirements, the present invention proposes a method for gesture recognition and picking of stacked workpieces based on RGBD cameras, which performs gesture recognition on industrial parts that have been processed but not sorted, and the application scenarios include picking and sorting of parts in a stacked state , Positioning and picking during the single transfer of parts, etc. Detect the workpiece in the given area that conforms to the specified model, identify it and estimate the attitude, and obtain the spatial coordinates of the workpiece center of mass, as well as the pitch angle and rotation angle of the workpiece relative to the specified model attitude in the detection area. By cooperating with the mechanical arm, the functions of positioning, grasping and classifying the workpiece are realized.
[0052] like figure 1As shown, the present invention provides a kind of stacking workpiece pose recognition and picking method ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More