

Method for controlling elevator tractor
A technology of elevator traction machine and control method, which is applied in the direction of speed/torque control of a single motor, estimation/correction of motor parameters, elevators, etc. performance issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
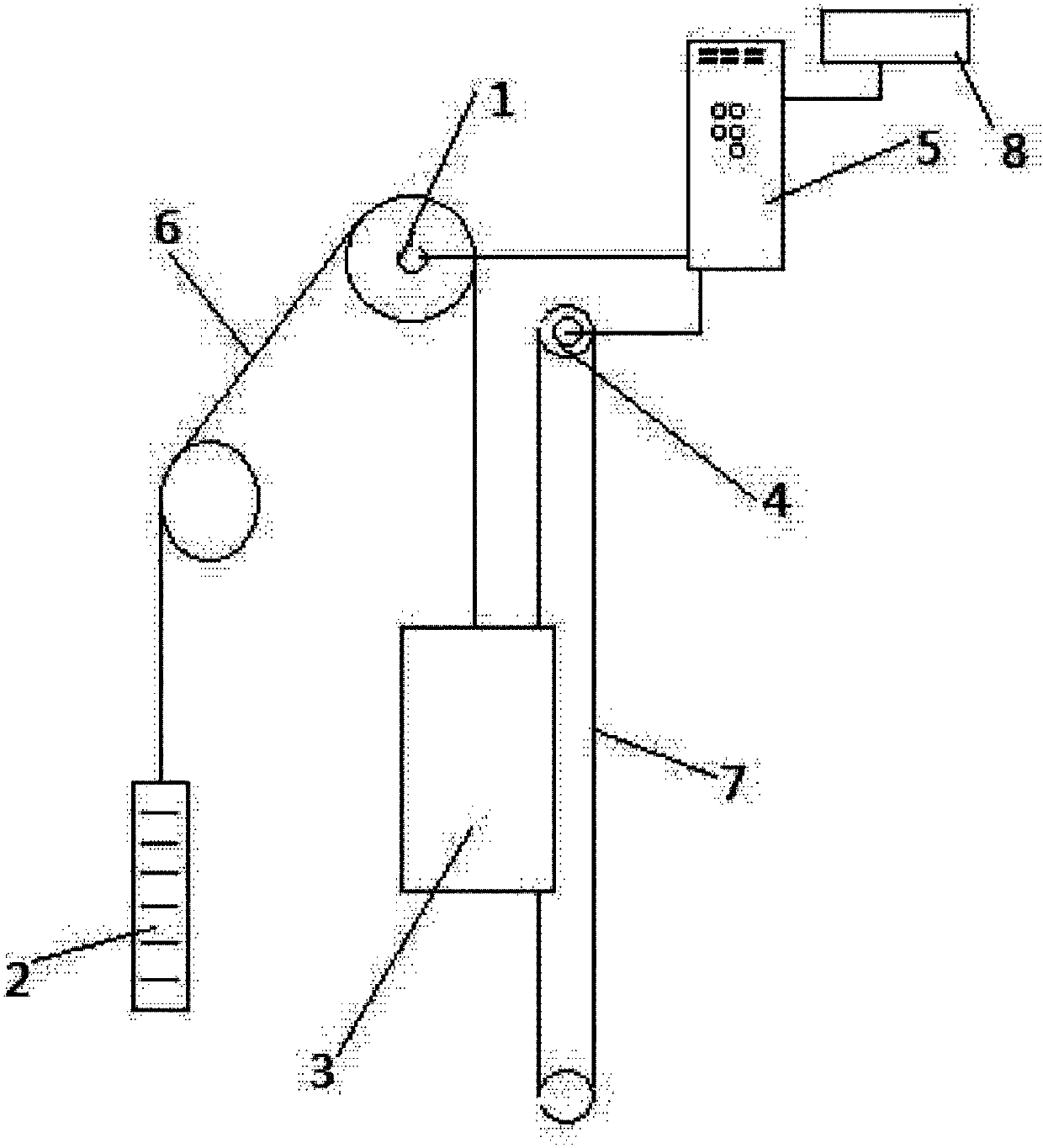
[0094] Such as figure 2 As shown, the traction machine drives the car 3 to move up and down through the main rope;
[0095] The speed limiter encoder 4 is installed on the flywheel shaft of the speed limiter, and the car 3 drives the flywheel of the speed limiter to rotate through the speed limiter rope, so that the speed limiter encoder 4 rotates to generate a coded signal output, and the car 3 moves The faster, the higher the frequency of the encoded signal output by the speed limiter encoder 4;
[0096] A control method for an elevator traction machine, comprising the following steps:
[0097] Step A. Obtain the initial rotor angle of the elevator traction machine
[0098] Step B. Obtain the low-speed rotor speed when the traction machine runs below the set speed and low speed rotor angle And the middle and high speed rotor speed when the traction machine is running higher than the set speed and medium and high speed rotor angle
[0099] Step C. According to t...
Embodiment 2
[0106] Based on Embodiment 1, the initial rotor angle of the traction machine is obtained in step A The method is:
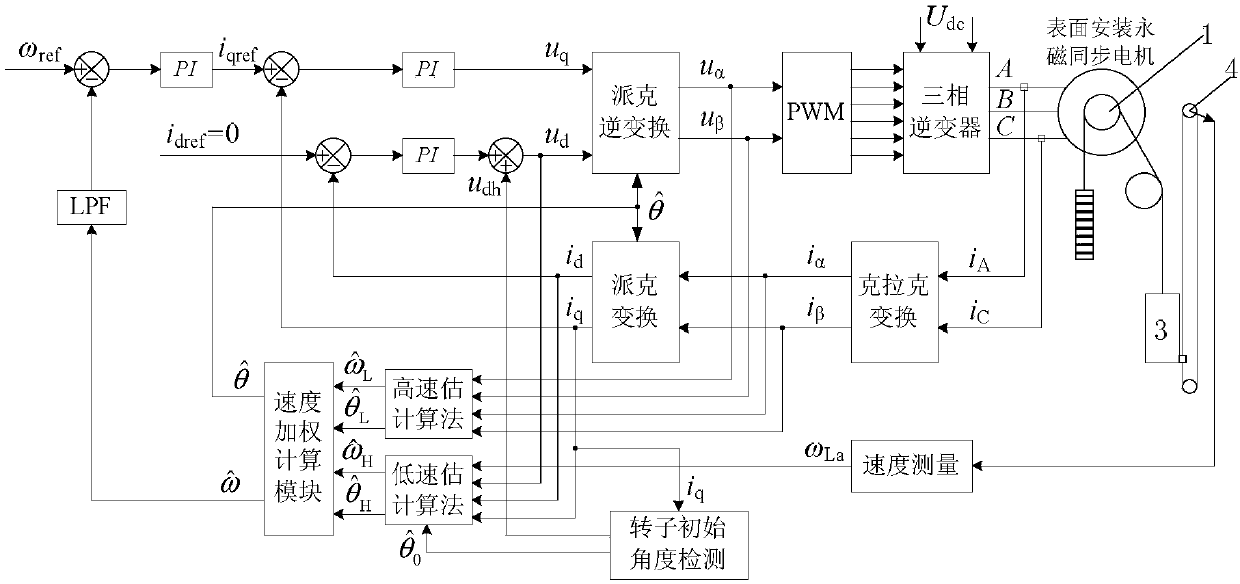
[0107] A1. Apply the set amplitude higher than the set frequency ω on the direct axis of the stator of the traction machine r The high-frequency sinusoidal signal of the traction machine is used to perform Clarke transformation and Parker transformation on the output current of the traction machine stator to obtain the quadrature axis component of the traction machine stator current;
[0108] A2. Pass the quadrature-axis component of the stator current of the traction machine through a second-order band-pass filter to select one of which is higher than the set frequency ω r The AC component of the AC component is multiplied by the unit sine signal to obtain the modulation signal;
[0109] A3. Use a band-stop filter to filter out the AC component in the modulation signal to obtain an error signal containing the rotor angle error;
[0110] A4. Use the PI contr...
Embodiment 3
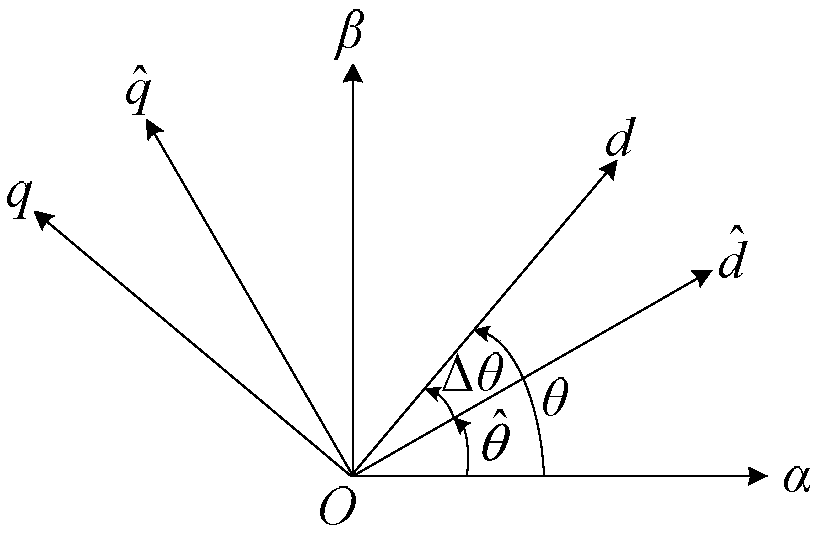
[0114] Based on the elevator traction machine control method in Embodiment 1, establish a coordinate system relationship diagram, such as image 3 As shown, d-q is the actual synchronous rotating coordinate system, In order to estimate the rotor synchronous rotating coordinate system, α-β is the actual two-phase stationary coordinate system, and the estimated position error is defined θ is the actual rotor angle, is the estimated value of the rotor angle in the full speed range;
[0115] Such as Figure 4 As shown, the initial rotor angle of the traction machine is obtained in step A The method is:
[0116] Step A10. Under the condition that the traction machine is stationary and the brake device is activated, estimate the rotor synchronous rotation coordinate system Inject the signal:
[0117] Among them, u qh is the signal applied on the quadrature axis of the stator, u dh is the sinusoidal signal applied on the direct axis of the stator, U h for u dh Amplit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More