

Tail-sitter vertical take-off and landing unmanned aerial vehicle as well as control system and control method thereof
A technology of vertical take-off and landing and control system, applied in the field of unmanned aerial vehicle, can solve the problems of non-working, reducing the payload, unable to fly, etc., to achieve the effect of small site, increased airborne time, and extended range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
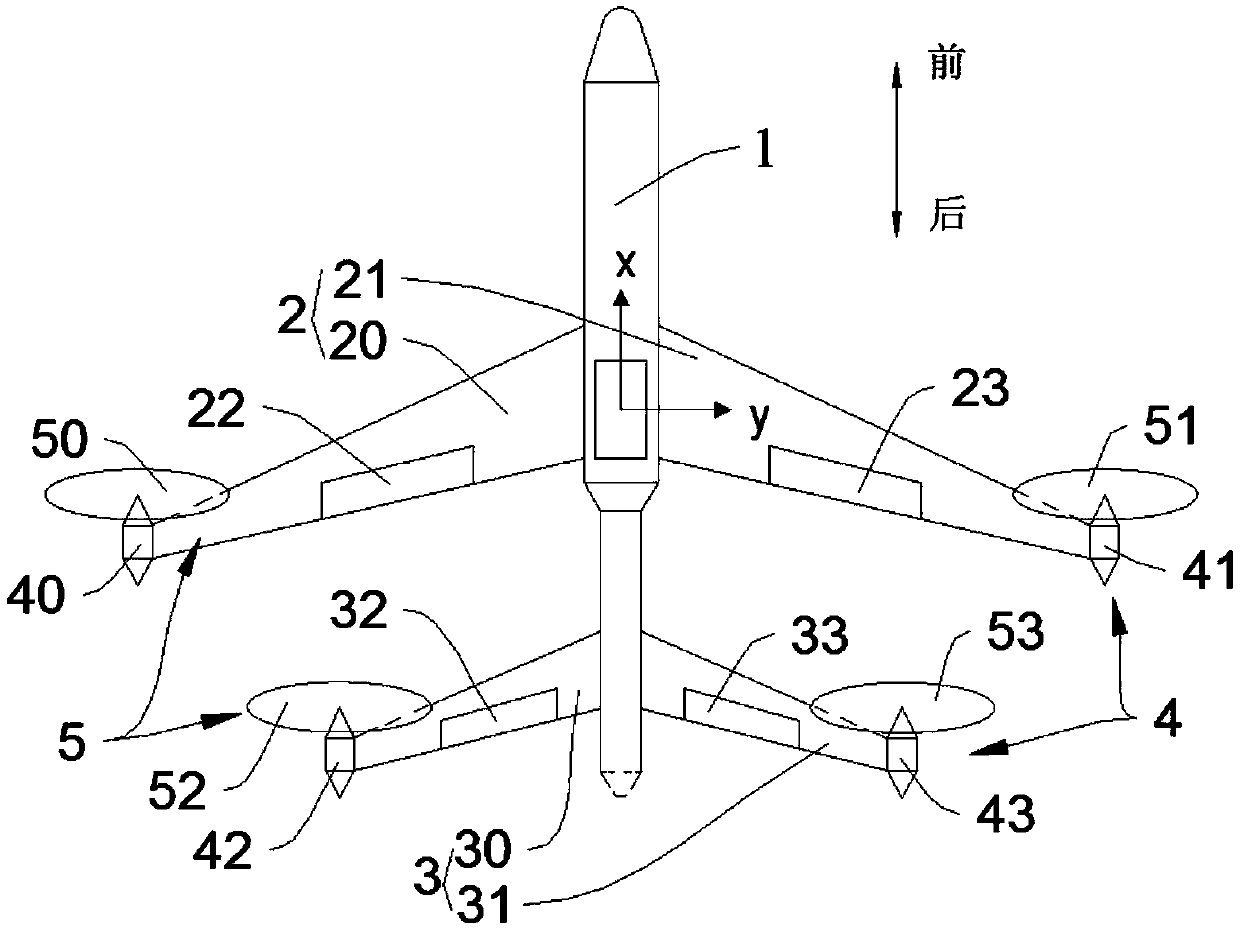
[0058] see figure 1 , Embodiment 1 of the present invention provides a tail-sitting vertical take-off and landing unmanned aerial vehicle, and the unmanned aerial vehicle comprises: fuselage 1, wing 2, empennage 3, and motor 4 and propeller 5, and described wing 2 and the empennage 3 is arranged on the outer surface of the fuselage 1, the wing 2 is arranged upside down, and the empennage 3 is set upside down;
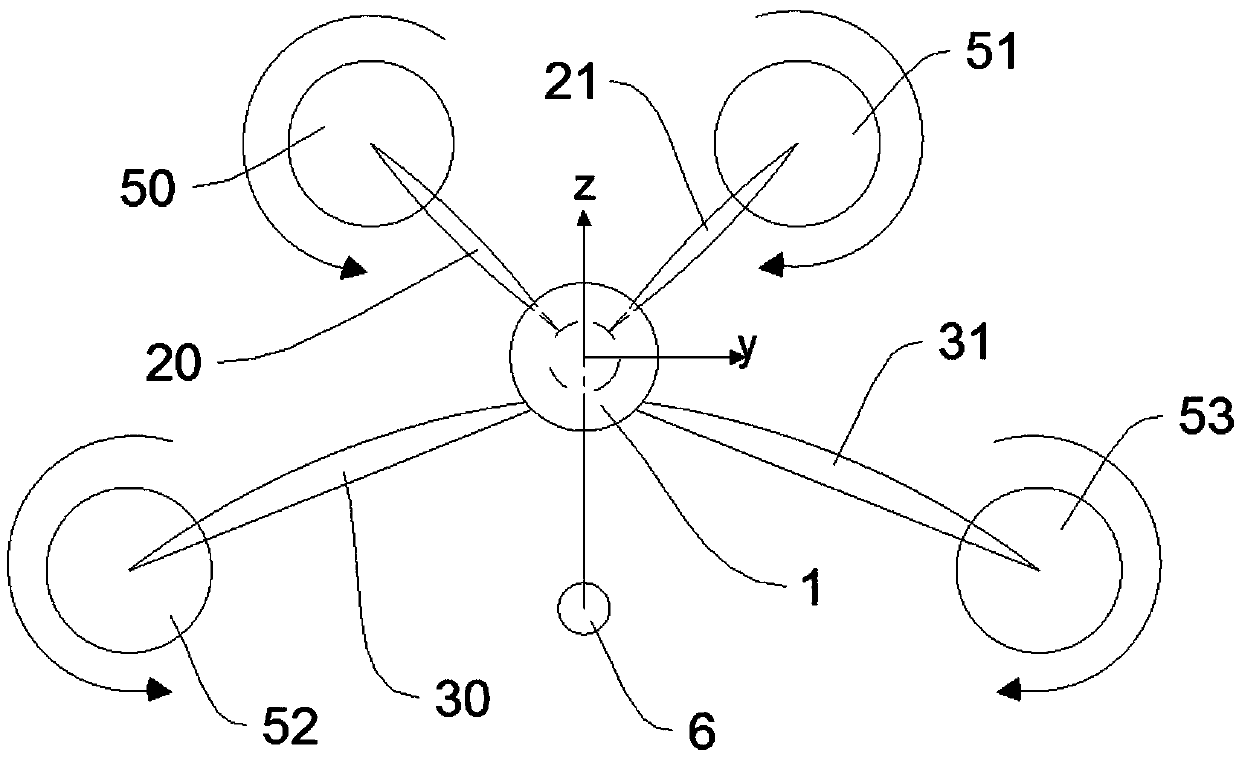
[0059] The wing 2 includes a first wing 20 and a second wing 21, and the first wing 20 and the second wing 21 are symmetrically installed on both sides of the middle part of the fuselage 1;
[0060] Empennage 3 comprises first empennage 30 and second empennage 31, and first empennage 30 and second empennage 31 are symmetrically installed on the tail both sides of fuselage 1;
[0061] Motor 4 comprises wing motor and empennage motor, and wing motor comprises first wing motor 40 and second wing motor 41, and empennage motor comprises first empennage motor 42 and second e...
Embodiment 2
[0082] Embodiment 2 of the present invention provides a control system for a tail-sit vertical take-off and landing UAV. The control system includes: a navigation module, a flight control module, a wireless communication module, a power system, an RC receiver, and a power supply module;
[0083] The navigation module, whose built-in sensor measures the force and moment it receives during the flight, uses the data fusion algorithm to calculate the flight attitude information and position information of the drone from the measured force and moment information, and sends it through the serial port to the flight control module;
[0084] The flight control module is used to comprehensively select the current flight mode according to the remote control signal, the ground station system command and the power system feedback; according to the target value of the position and attitude, use the PID control algorithm to generate control commands for the motor and steering gear; use PWM (...
Embodiment 3
[0099] Embodiment 3 of the present invention provides a control method for a tail-sitting vertical take-off and landing unmanned aerial vehicle, comprising the following steps:
[0100] (1) The sensor in the navigation module measures the force and moment it receives during the flight, and uses the processor in the module to calculate the angular acceleration, linear acceleration, and angular velocity of the drone from the measured force and moment information , line speed, angle, displacement and other flight attitude information and position information, and send them to the flight control module through the serial port;
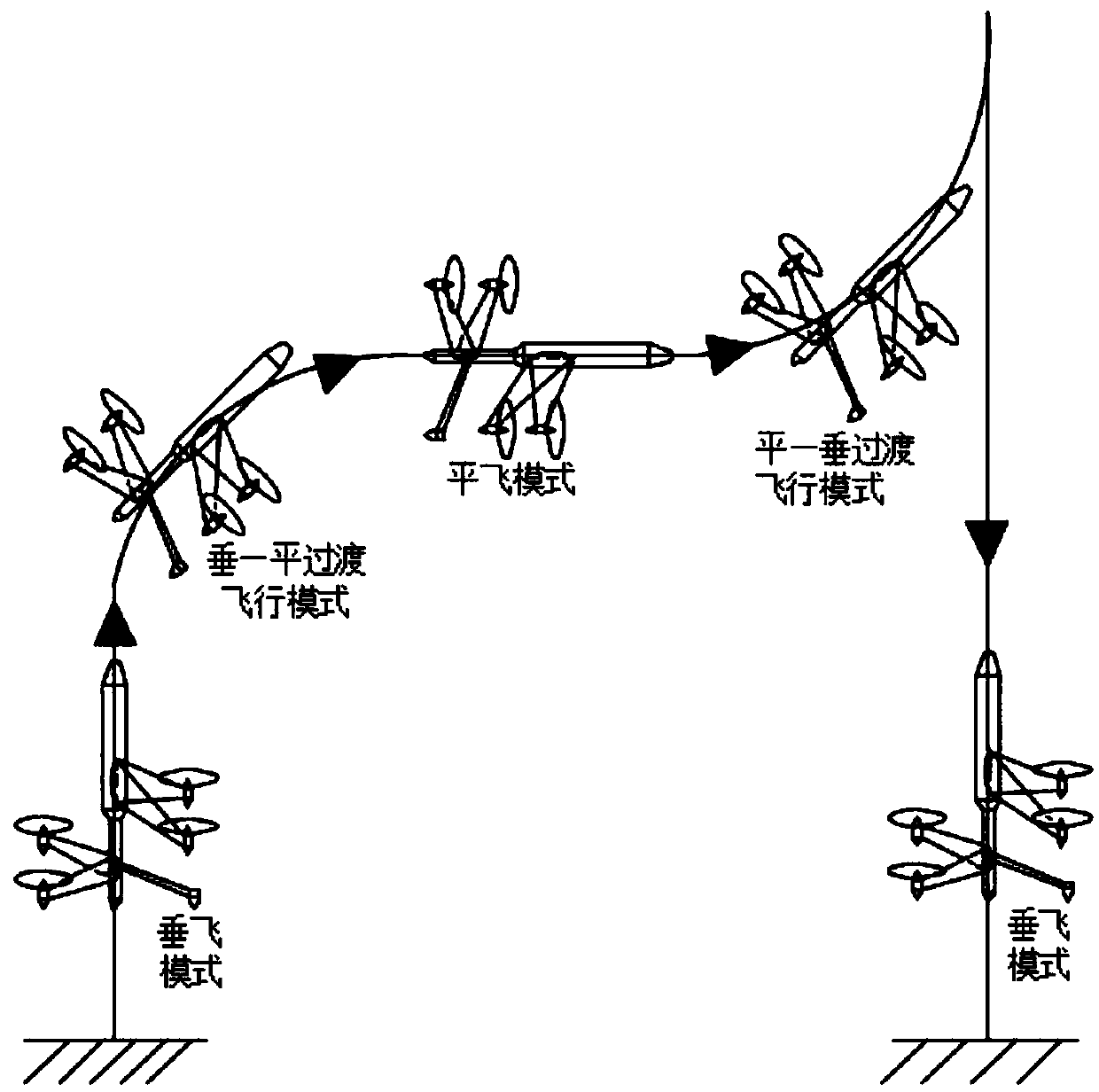
[0101] (2) The flight control module receives the attitude and position information output by the navigation module through the serial port, and receives the target state command information sent by the remote controller or the ground station through the wireless communication module to select the flight mode.
[0102] (3) Utilize the PID controller to pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More