

A dual-image visual navigation method in the curved intestine of a dual-hemispherical capsule robot
A capsule robot and visual navigation technology, applied in image communication, television, esophagoscopy and other directions, can solve the problems of low inspection efficiency, high requirements for image parameters, complex algorithms, etc., to reduce the requirements of installation and processing accuracy, and to simplify the operation process. The effect of fast and convenient human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
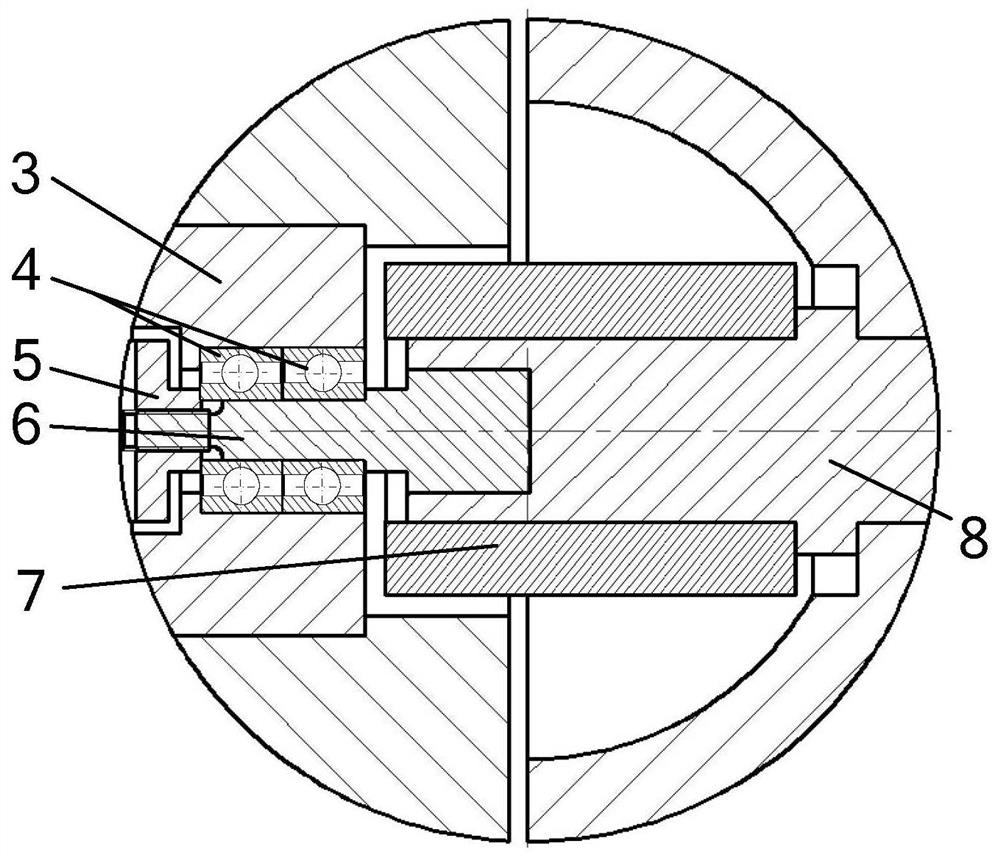
[0090] (1) When the dual hemispherical capsule robot is at position A, such as image 3 As shown, take the first image, and extract the centroid pixel coordinates of the dark area as (520, 135), as shown in Figure 10(a), read the magnetic vector direction θ=50° and δ=75° from the magnetic field controller at this time °; Keep the pitch angle of the magnetic vector direction unchanged, only change the side swing angle, the dual hemispherical capsule robot is still again, take the second image, and extract the pixel coordinates of the center of mass in the dark area of the image as (361, 476), as shown in Figure 10 As shown in (b), read the magnetic vector direction θ=30° and δ=75° from the magnetic field controller at this time. Calculate the rotation angle α*=65° of the camera around the axis of the dual-hemispherical capsule robot through formulas (1)-(3).
[0091] (2) Using the magnetic vector directions θ=50° and δ=75° when taking the first image, combined with the rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More