

Parallel robot for prostate flexible needle particle implanting
A flexible needle and robot technology, applied in X-ray/γ-ray/particle irradiation therapy, radiation therapy, treatment, etc., can solve problems such as difficult to guarantee positioning accuracy, affect treatment effect, soft tissue trauma, etc., and achieve precise spatial position positioning, Enhance the effect of treatment and improve the effect of implantation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
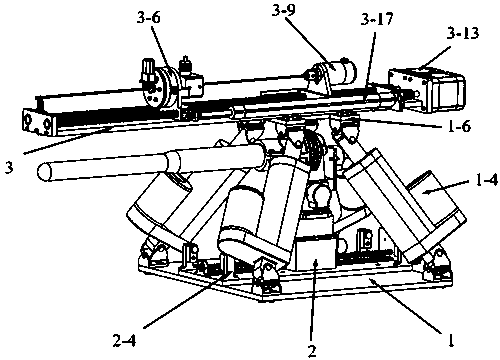
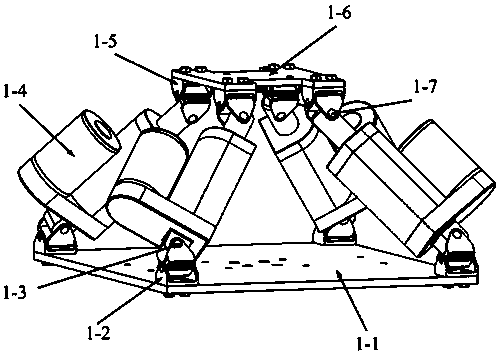
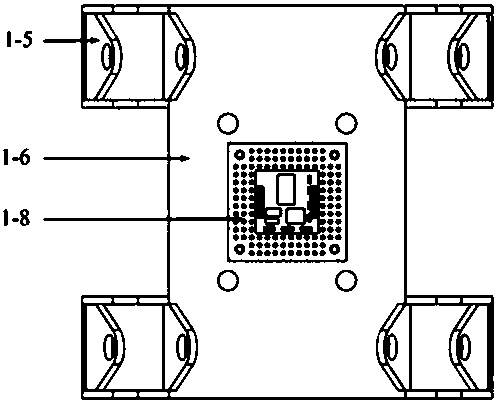
[0032] Embodiment 1: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 , Figure 11 , Figure 12 As shown, this specific embodiment adopts the following technical solutions: a prostate flexible needle particle implantation parallel robot, characterized in that: it includes a parallel attitude adjustment mechanism 1, an ultrasonic image navigation mechanism 2 and a flexible needle particle implantation mechanism 3, its It is characterized in that: the lower base 1-1 of the parallel attitude adjustment mechanism 1 is connected to the operating table or other mechanical arms through bolts, and the ultrasonic image navigation mechanism 2 is fixed on the parallel attitude adjustment mechanism 2 via the ultrasonic device base 2-1 through bolts. The lower base 1-1 of the mechanism 1, the flexible needle particle implantation mechanism 3 is fixed on the upper support 1-6 of the parallel attitude adjustment...
Embodiment 2
[0038] Embodiment 2: Define the initial power-on position of the prostate flexible needle particle implantation parallel robot;
[0039] According to the device described in Example 1, when the prostate flexible needle particle implantation parallel robot is in the initial power-on position, the upper support 1-6 in the parallel attitude adjustment mechanism 1 drives the flexible needle particle implantation mechanism 3 to keep pitching and turning over And the yaw angle is zero, the outer needle device 3-6 in the flexible needle particle implantation mechanism 3 is at the position where the displacement sensor 3-17 shrinks to zero, and the inner needle device 3-9 is at the off-off position of the rear limit switch 3-10. Electrical position; the translation slider 2-2 in the ultrasonic image navigation mechanism 2 is in the position of the rear limit switch 2-8 of the translation slider at the rear end of the ultrasonic device base 2-1, and at the same time, the ultrasonic disp...
Embodiment 3
[0040] Example 3: Prostate Flexible Needle Particle Implantation Parallel Robot The specific implementation principle: First, the patient lies on the operating bed in the lithotomy position, and the perineum is disinfected and anesthetized; the lower base 1-1 of the parallel attitude adjustment mechanism 1 is passed through the bolts Connect with the operating table or other mechanical arms, put the radioactive particles 125I into the magazine and insert them into the particle implantation chamber 3-6-9 in a sealed environment before operation, and make the flexible needle particle implantation mechanism 3 by adjusting the parallel attitude adjustment mechanism 1 The outer needle support 3-3 of the needle reaches the perineum, and at the same time, adjust the translation slider 2-2 to make the ultrasonic probe 2-6-9 enter the anus, and complete the preoperative preparation; then, control the translation slider 2-2 and the ultrasound The pitch, yaw, and rotation attitudes of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More