Thermal expansion fluid composite non-special-shaped cavity driven type robot soft hand
A thermal expansion, robotic technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of limited degrees of freedom, poor environmental adaptability, and insufficient ability to stably and reliably grasp complex-shaped objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
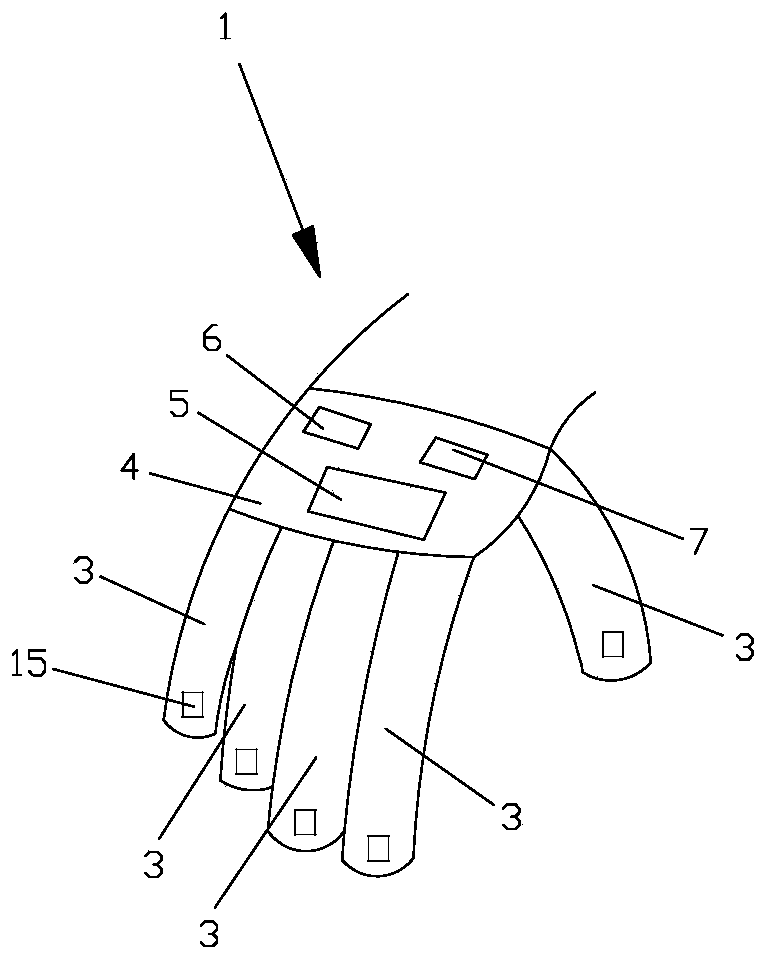
[0043] Embodiment 1: A thermally expanding fluid combined with a shape memory alloy combined with a non-shaped cavity unilateral driver 2 is a robotic soft hand 1 driven by a thermally expanded fluid combined with a non-shaped cavity.
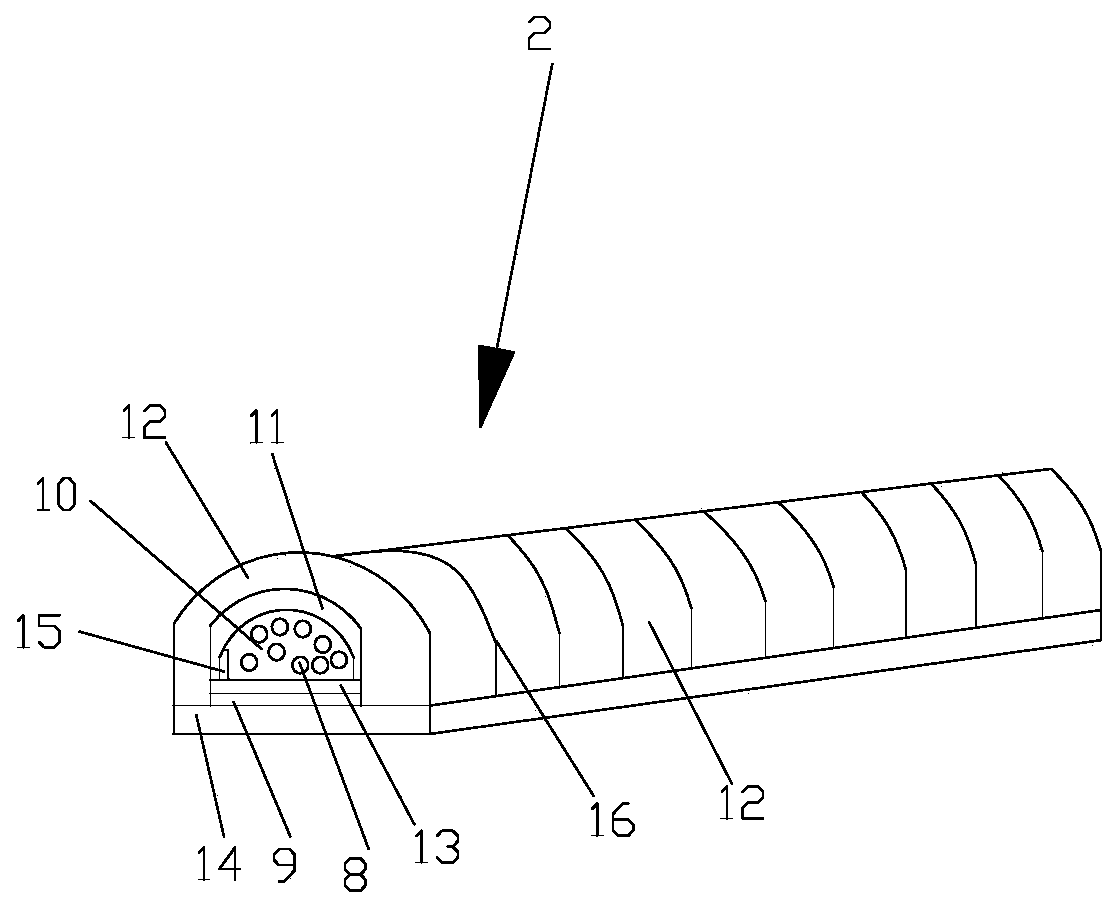
[0044] Example 1 of the present invention uses thermal expansion fluid and shape memory alloy composite non-special-shaped cavity unilateral driver 2 for the structural schematic diagram of thermal expansion fluid composite non-special-shaped cavity-driven robot soft hand 1. figure 1 ; The structural schematic diagram of the single-side driver 2 of the composite non-special-shaped cavity of thermal expansion fluid and shape memory alloy is shown in figure 2 .
[0045] The thermal expansion fluid composite non-special-shaped cavity-driven robot soft hand 1 of Embodiment 1 of the present invention includes: five thermal expansion fluid composite non-special-shaped cavity-driven robot soft fingers 3, thermal expansion fluid composite non-special-...
Embodiment 2
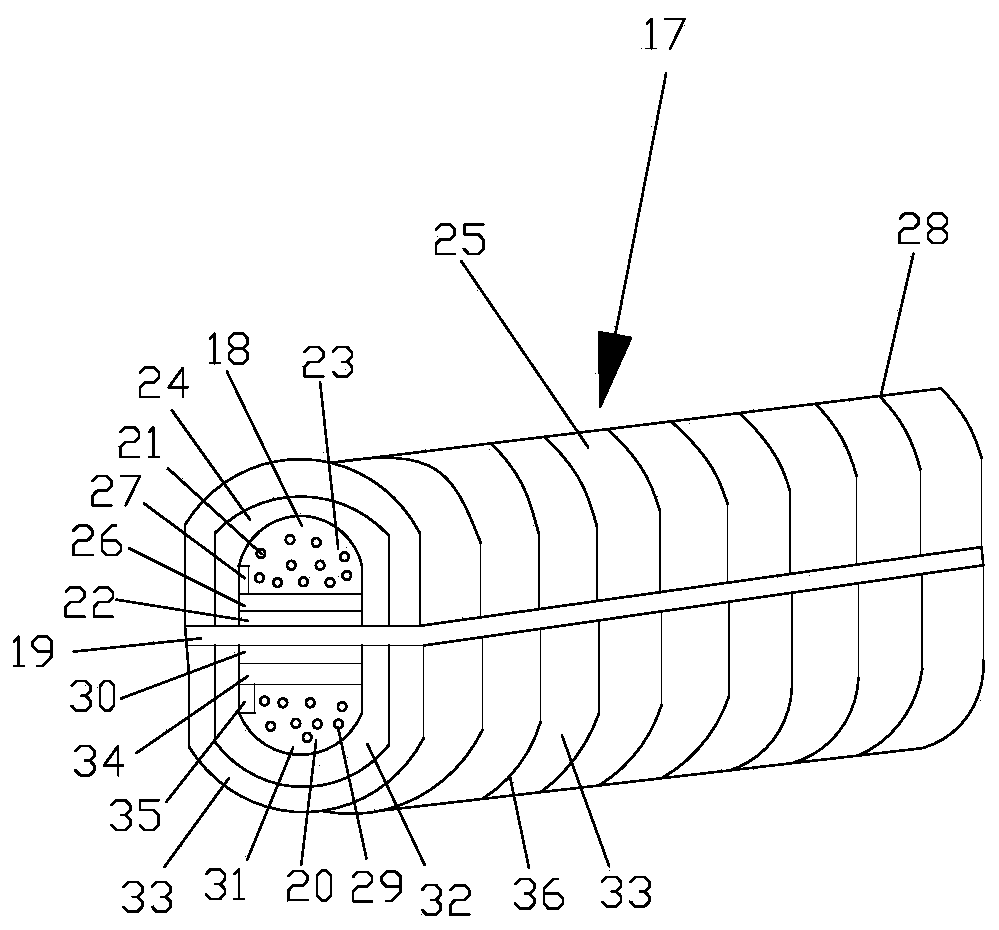
[0050] Embodiment 2: A thermal expansion fluid combined with non-special-shaped cavity-driven robot soft hand 1 using thermal expansion fluid and electronically controlled heating materials to combine non-special-shaped cavity double-sided drivers 17.
[0051] Embodiment 2 of the present invention uses thermal expansion fluid and electronically controlled heating material to combine non-special-shaped cavity double-sided drivers 17. The structural schematic diagram of the thermal expansion fluid composite non-special-shaped cavity-driven robot soft hand 1 is shown in figure 1 ; The structure schematic diagram of the non-special-shaped cavity double-sided driver 17 composed of thermal expansion fluid and electrically controlled heating material is shown in image 3 .
[0052] The thermal expansion fluid composite non-special-shaped cavity-driven robot soft hand 1 according to Embodiment 2 of the present invention includes: five thermal expansion fluid composite non-special-shap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com