

Design method for scheduling unmanned aerial vehicle based on robust servo gain
A technology of servo gain and design method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of the specific form of the controlled system and the unrealistic solution of LMI online.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0085] This embodiment provides a technical solution: a method for designing a UAV controller based on robust servo gain scheduling, including the following steps:
[0086] S1: Establishing the longitudinal LPV system model of variable structure UAV
[0087] Using the improved model linearization processing method based on the function substitution method, by improving the function substitution method for establishing the LPV system model, and using it to establish the longitudinal LPV system model of the variable structure UAV, the expression of the longitudinal LPV system model is as follows:
[0088]
[0089] in Represents the state variables of the LPV system, Indicates the output variable of the system, Indicates the control input of the system enter, Indicates the time-varying parameters of the system, and the time-varying parameters in the actual system are bounded;
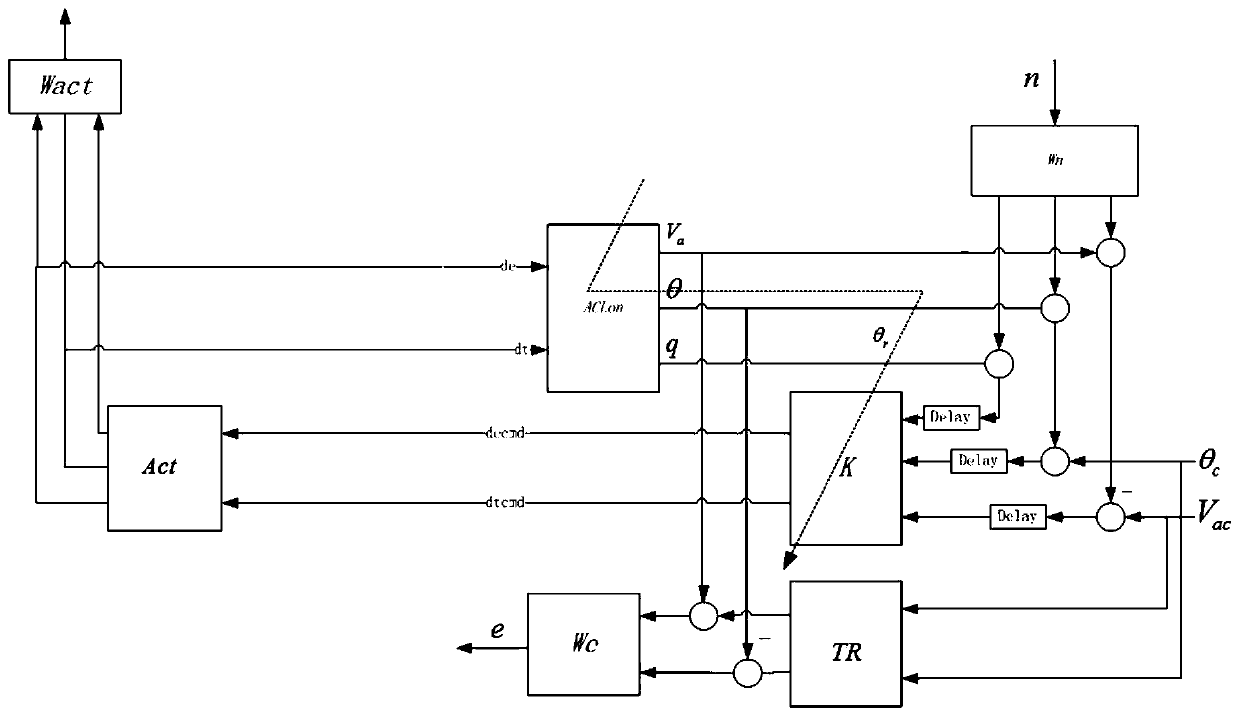
[0090] S2: Introduce additional state and structure matrix
[0091] The variable gain con...
Embodiment 2
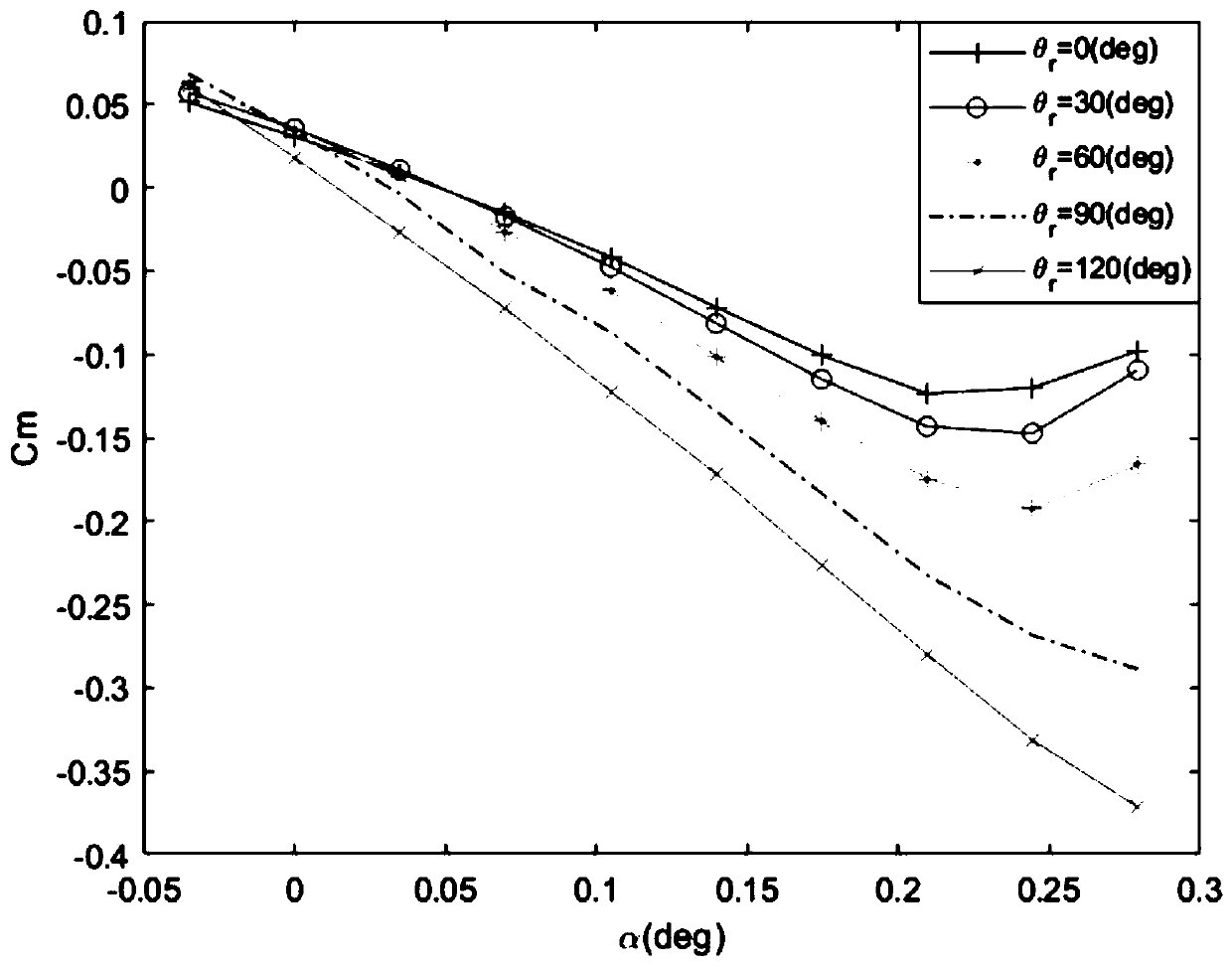
[0218] In order to verify the improved function substitution method designed to establish the longitudinal LPV system of the morphing UAV, the function substitution processing method is verified by taking the morphing aircraft as an example.
[0219] Figure 3 ~ Figure 6 For the deformed wing, the aerodynamic data relationship between the pitch moment coefficient and the angle of attack, the pitch moment coefficient and the elevator deflection angle, the roll moment coefficient and the aileron rudder deflection angle, and the pitch angle moment damping coefficient and the angle of attack under different folding angles are given by Figure 3-5 It can be seen that the relationship between the pitching moment coefficient and the rolling moment coefficient is approximately linear when the angle of attack is small, Image 6 The change between the damping coefficient of the pitching moment and the angle of attack shown shows a nonlinear relationship with the change of the angle of a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More