

Multi-shaft synchronous operator and control system thereof
A multi-axis synchronization and operating system technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve problems such as poor reliability, low efficiency, and high technical difficulty, so as to improve operating speed, ensure real-time performance, and simplify calculations volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
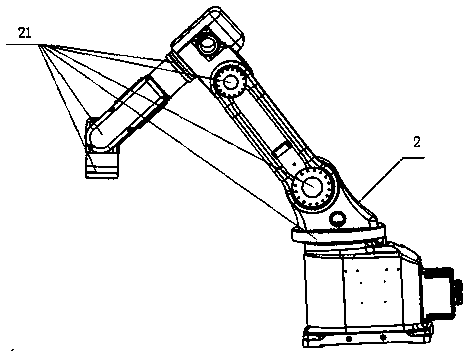
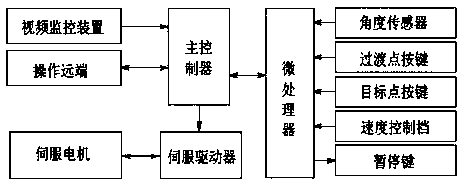
[0045] The six-axis robot 2 is controlled by servo motors at the positions of the six designed joints 21 , that is, it includes six-way servo motors; and six-way servo drives are connected to the six-way servo motors. The output terminals of the main controller of the robot control system are respectively connected with six servo drives. Each servo motor is equipped with an encoder to feed back the rotation angle (position) of the servo motor. The encoded signal is sent to the servo driver to form a real-time closed loop. At the same time, the encoded signal is sent to the main controller, and then the main controller presses a certain The needs are processed, and then the control signal is sent to the servo driver to control the state or position of the servo motor, forming a double closed loop to achieve precise control of the position and speed of the servo motor rotation. The six-axis synchronous manipulator is equipped with six independent angle sensors to detect the six-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More