

Large-scale heavy load hexapod robot
A hexapod robot, a large-scale technology, applied in the field of robotics, can solve the problems of poor load capacity and difficult application, and achieve the effects of compact layout, enhanced use effect, and improved use value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
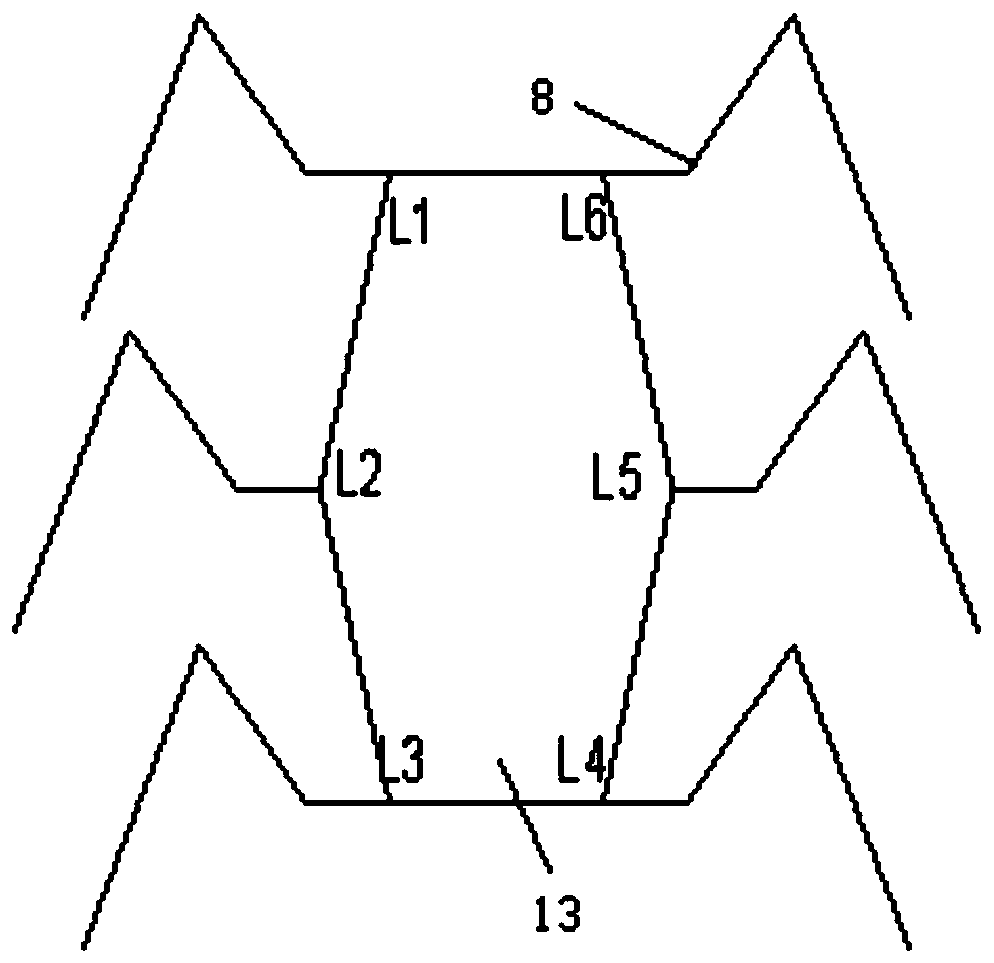
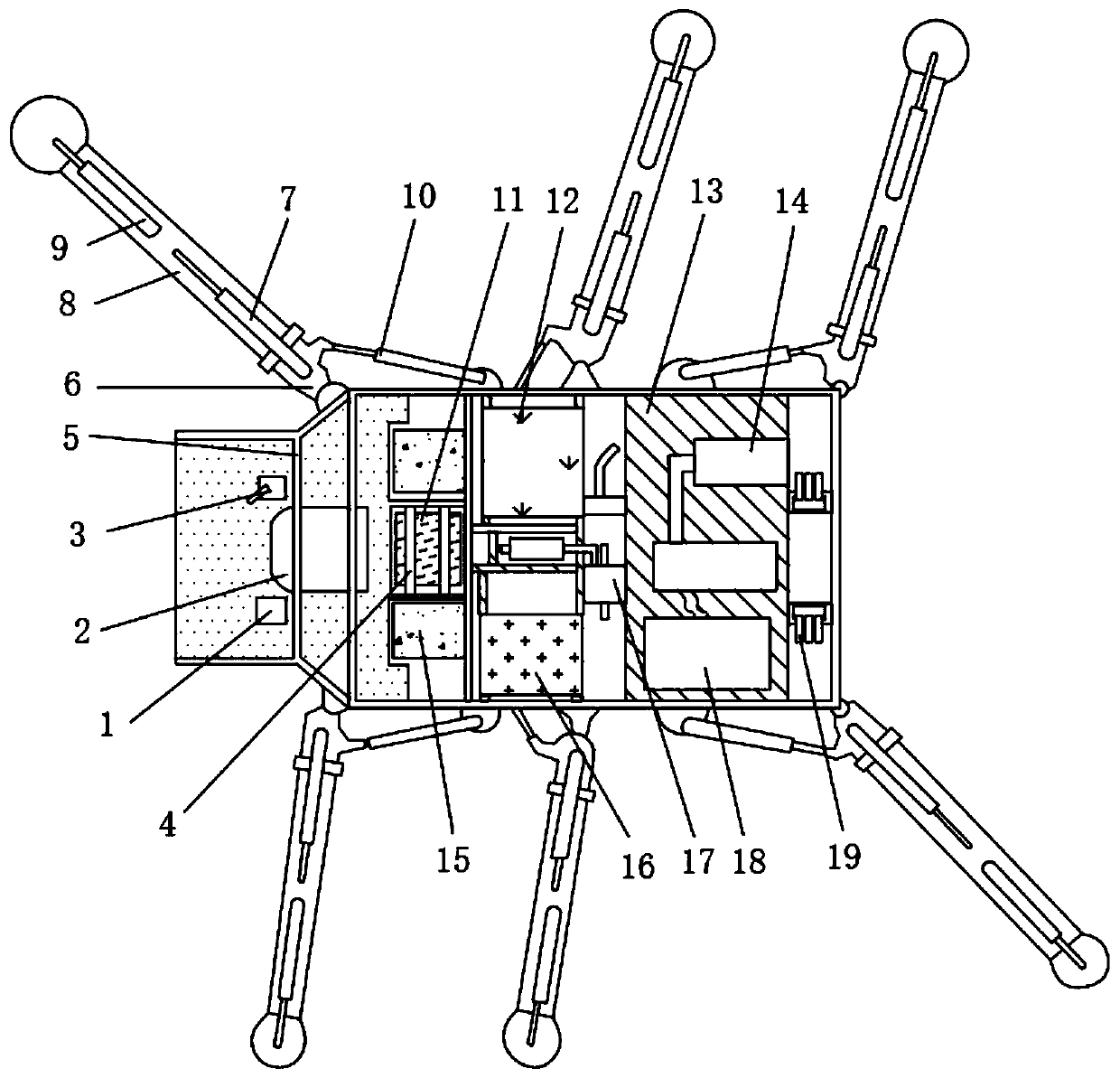
[0029] refer to Figure 1-6 , a large-scale heavy-duty hexapod robot, including a frame system, a hood system, a walking leg system, an electric control system, a power system and a hydraulic system. frame 13, and the frame 13 is supported by section steel, the four corners of the frame 13 are all provided with angle steel reinforcement, and the two sides of the frame 13 are provided with three base sections 6, and the base sections 6 are hinged with walking legs 8. The walking leg 8 is provided with a hydraulic drive mechanism, and the vehicle frame 13 reinforced by the section steel and the angle steel for reinforcement are provided at the four corners of the vehicle frame 13, so that the load capacity of the vehicle body can be increased on the existing basis , and use hydraulic drive to make the mass-to-power ratio large, so that the large-scale hexapod robot has good environmental adaptability, can be further widely used in complex environments, and can be put into daily ...
Embodiment 2
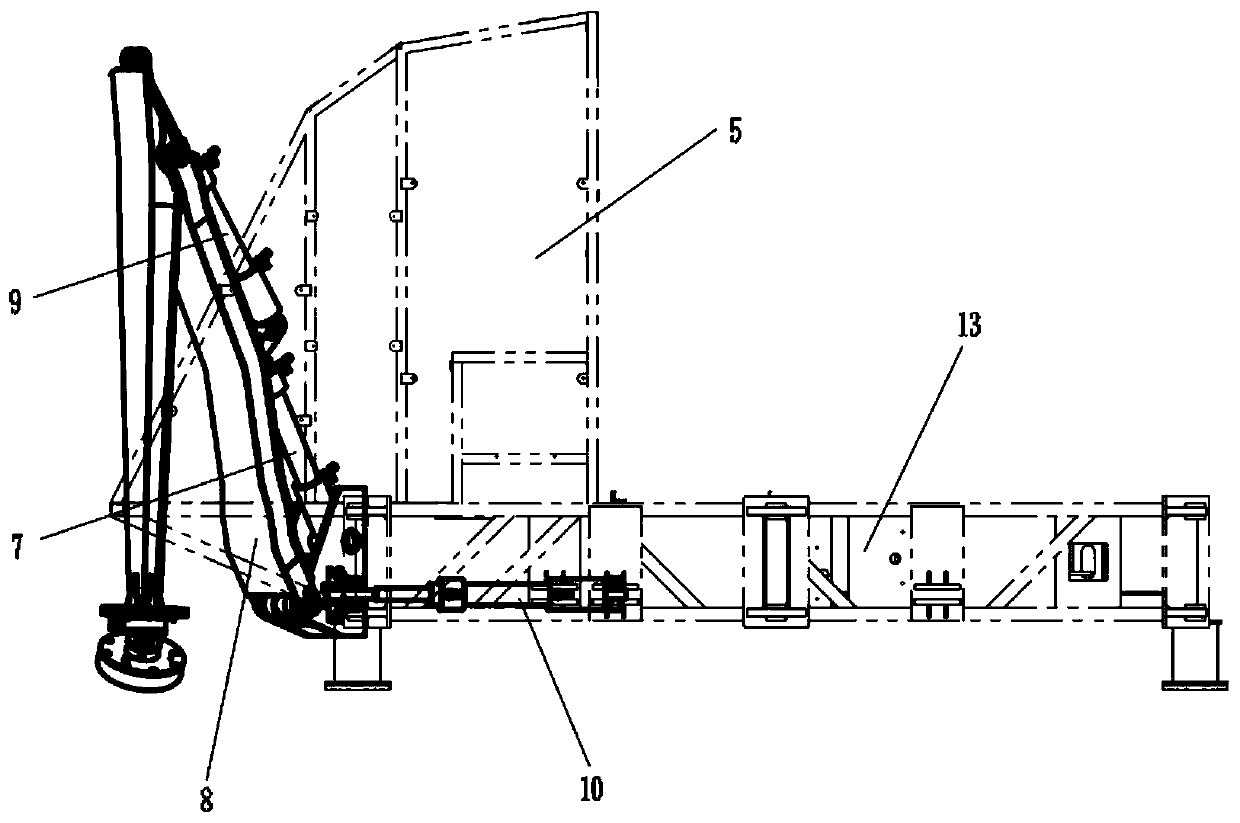
[0034] refer to Figure 1-6 , a large-scale heavy-duty hexapod robot, the front half of the frame 13 is a triangular structure, and the front half of the frame 13 is provided with a cab 5, which is connected by bolts to facilitate cleaning and maintenance. The seat 2 and the control handle 3, the rear of the driver's seat 2 are arranged with a connecting chair 4 and a battery 11 for other people to take;
[0035] The cab 5 is connected by bolts, and can be lifted and disassembled when the robot encounters a failure to form a detachable cab. The joystick 3 is used to control the gait of the robot to which it belongs, and then to control the walking of the robot to which it belongs. The seat saves space and is connected by bolts. It is also a detachable structure. In order to make the layout compact, the battery 11 required for the control of the electronic control system is arranged under the connecting chair 4;
[0036]The hydraulic system is provided with a main valve block ...
Embodiment 3
[0038] refer to Figure 1-6 , a large-scale heavy-duty hexapod robot, the frame 13 is provided with a water tank 18 on the side close to the fuel tank 16, and the engine 14 and the hydraulic oil tank 12 are arranged on one side of the frame 13, in order to keep the center of gravity of the robot at a lower position, The second half of vehicle frame 13 is supported and strengthened with channel steel, and the latter half of vehicle frame 13 is processed into concave font, and the channel steel that is about to place engine 14 is welded on the lower plane of vehicle frame 13, and the engine mount of fixing engine 14 is welded on On the channel steel, the engine 14, the water tank 18 and the radiator are placed in the groove by bolt connection. In addition, since the hydraulic oil tank 12 is heavier than the fuel tank 16, and the hydraulic pump and the hydraulic oil tank 12 are arranged on the same side, the power When using the system, the water tank 18 and the diesel tank 16 ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More