

Inversion sliding mode mechanical arm controller design method based on finite time disturbance observer
A disturbance observer, limited time technology, applied in the direction of manipulator, adaptive control, general control system, etc., can solve the problems of long arrival time of sliding mode surface and large system chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
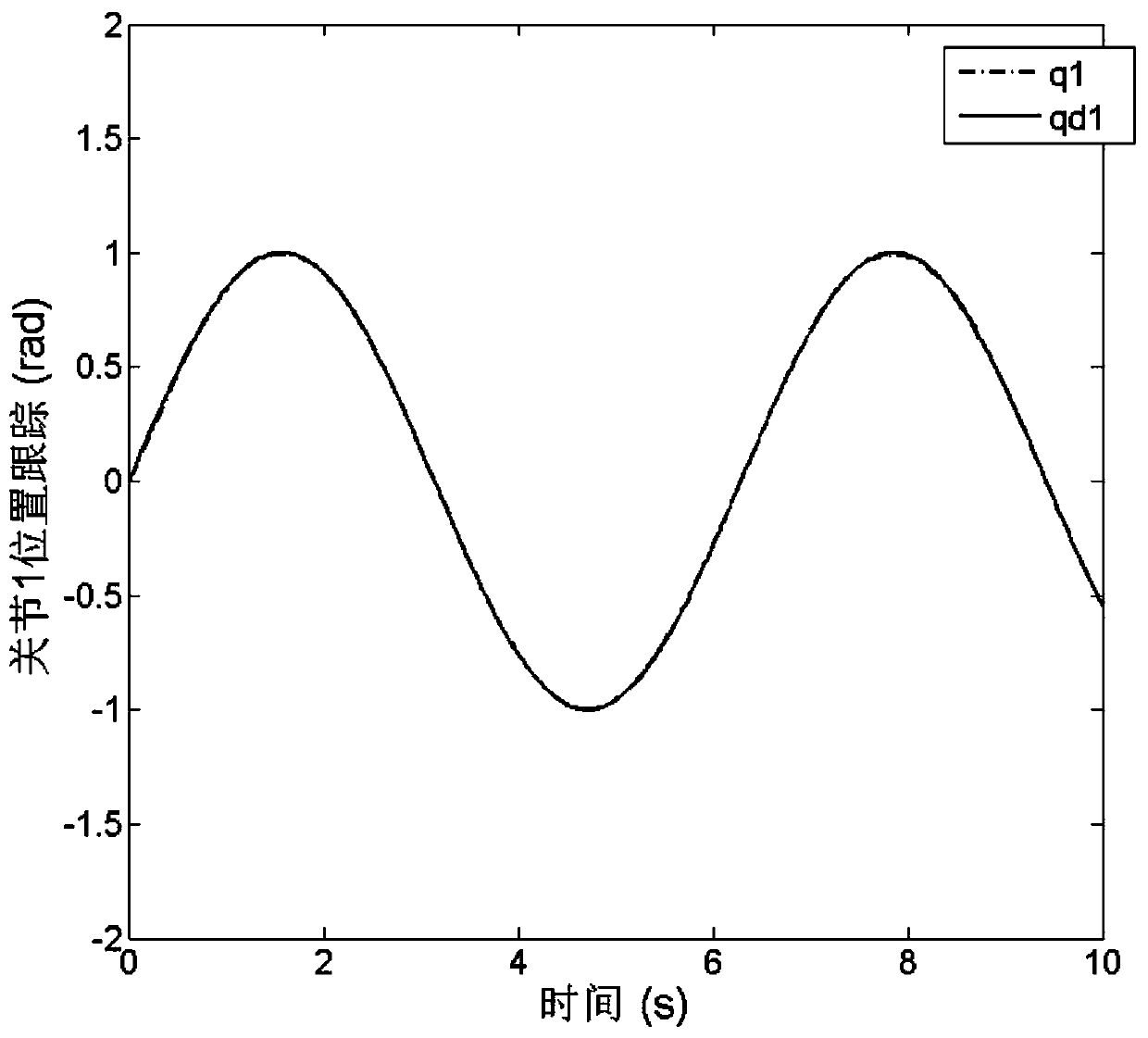
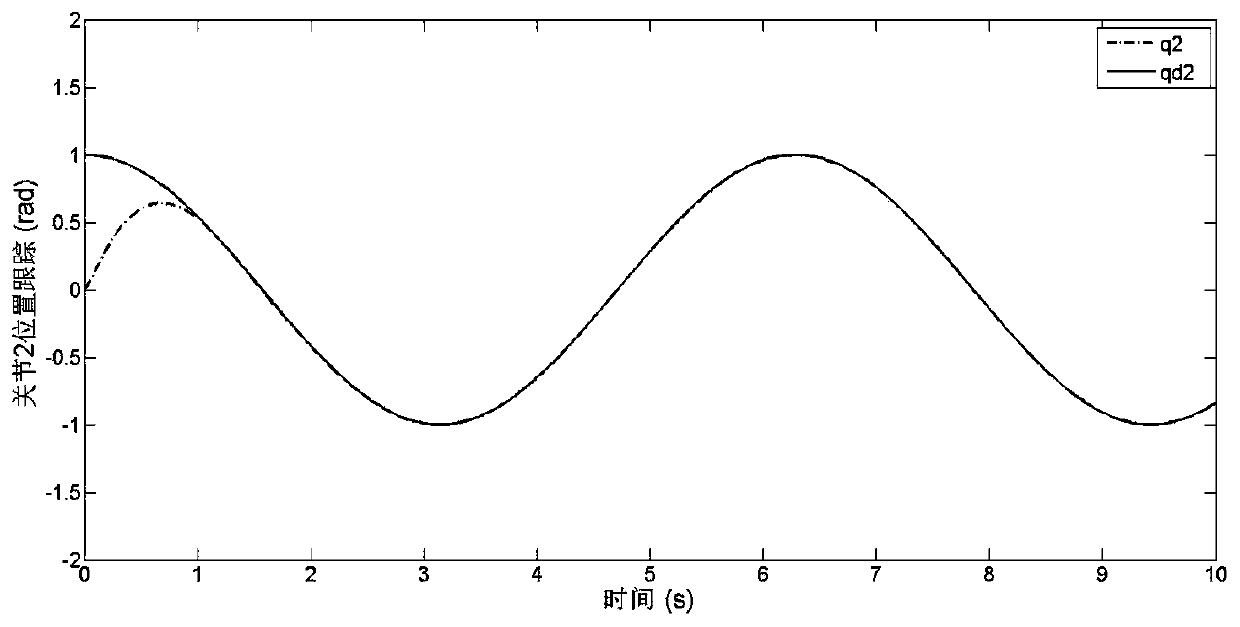
[0065] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings. In order that those skilled in the art can better understand the implementation of the present invention, the present invention also provides simulation verification results of using Matlab software for fault-tolerant control.
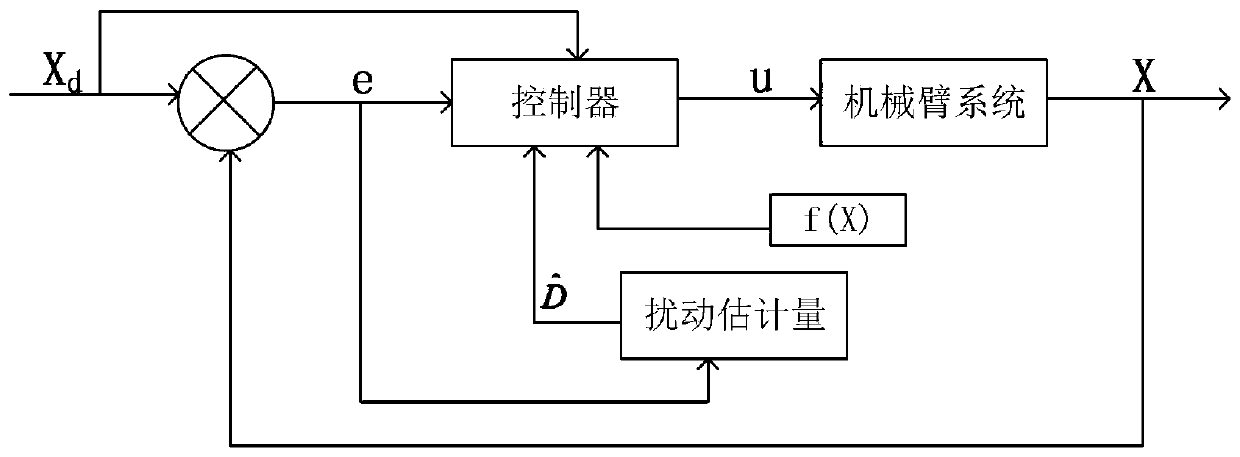
[0066] Such as figure 1 As shown, in order to trace the reference instruction X d , by first estimating the estimated value of the disturbance based on the disturbance observer The uncertainty of f(x) is also taken into account. After integrated into the controller, the manipulator system can quickly track the expected signal and achieve the expected effect. The present invention is an inversion control method based on a disturbance observer, comprising the following steps:
[0067] Step 1, establish a general model of space manipulator dynamics, the model is as follows:
[0068]
[0069] where q∈R n ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More