

Six-freedom-degree puncture operation robot
A surgical robot and a degree of freedom technology, applied in the field of medical experiments, can solve problems such as difficult to solve target deviation, and achieve the effect of eliminating adverse effects, huge practical value, and improving surgical efficiency and precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The purpose and effects of the present invention will become clearer by describing the present invention in detail according to the accompanying drawings and preferred embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
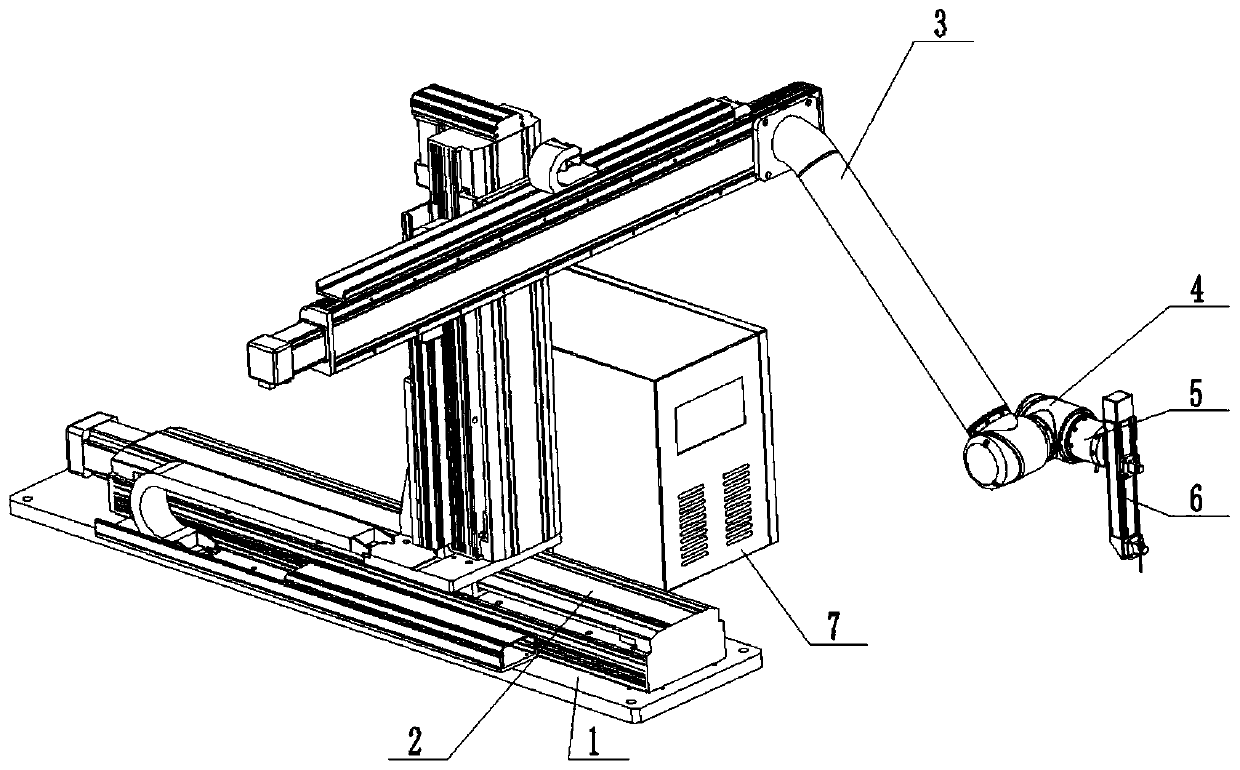
[0030] Such as figure 1 As shown, the six-degree-of-freedom puncture surgical robot of the present invention includes a base plate 1, an XYZ three-axis mobile platform 2, an extension rod 3, an αβ angle joint module 4, a six-dimensional force sensor module 5, a puncture needle module 6, a robot control system 7; wherein,
[0031] The XYZ three-axis mobile platform 2 is fixed on the base plate 1, and is used to adjust the displacement of the robot in the XYZ direction;
[0032] An extension unit 3, one end of which is connected to the Y-axis moving platform, and the extension unit 3 extends obliquely downward in a direction with an angle o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More