Transmission assembly, driving box, surgical instrument system and robot system
A technology of transmission components and drive boxes, applied in the fields of drive boxes, surgical instrument systems, robot systems, and transmission components, can solve the problems of limited force area, no dust-proof measures for axial movement, large axial size, etc. Effects of Axial Dimensions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
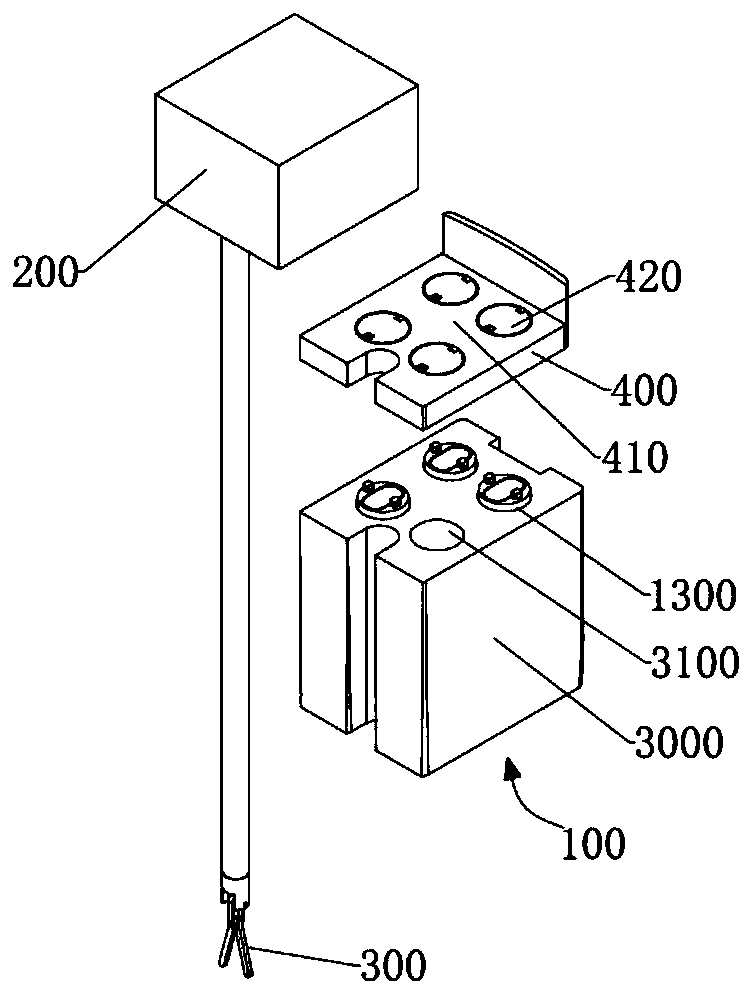
[0163] Similar to the first embodiment, the maximum utilization rate of the axial dimension of the transmission assembly 1000 provided in this embodiment is determined by the n value and the q value. Since there is no need to open a through hole 1513 on the fourth end of the output base 1300 in this embodiment, and there is no need to provide a groove, the thickness q of the fourth end of the output base 1300 can be reduced (in actual manufacturing, q The value can be controlled between [0.3mm, 3mm]), thereby reducing the axial size of the entire transmission assembly 1000 and increasing the utilization of the axial size of the transmission assembly 1000.
[0164] Further, in order to make the structure of the transmission assembly 1000 more compact, lighter in weight, and tighter and more reliable in connection with the drive mechanism 2000, the present embodiment also provides a comparison between the various components of the transmission assembly 1000. The position relationsh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More