

A station layout method for reducing robot motion energy consumption
A technology of robot motion and layout method, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem of not considering the interaction between station layout and robot trajectory planning, and achieve low robot motion energy consumption, simple and effective algorithms, The effect of reducing work energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
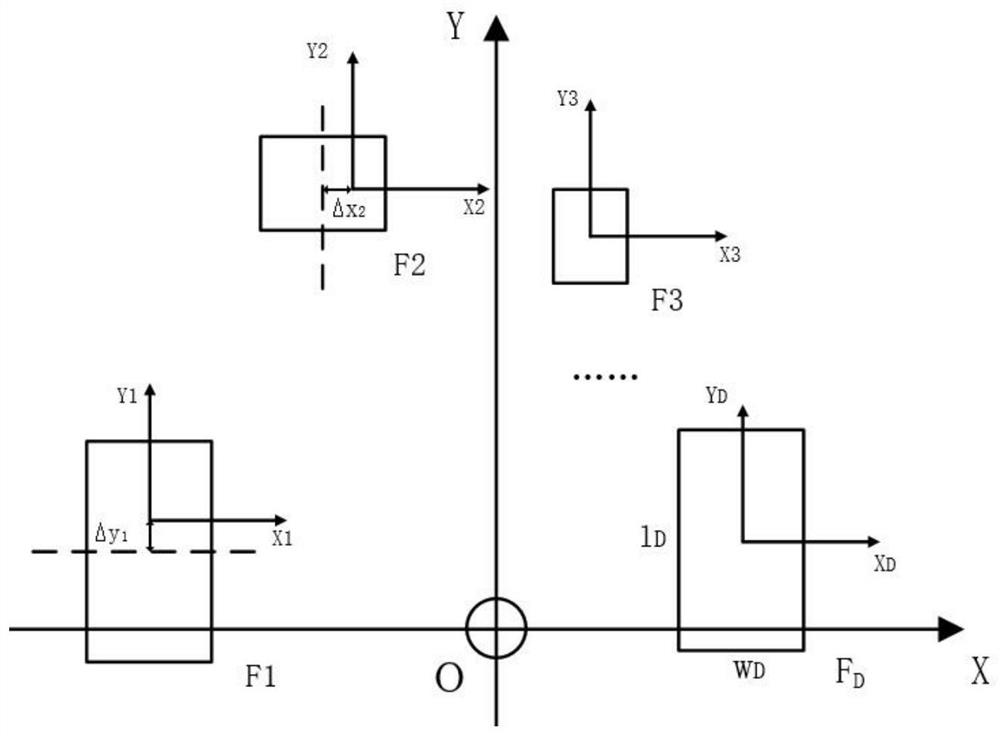
[0096] This embodiment studies the impact of the station layout on the energy consumption of robot, and the dynamic station layout establishes robot sports energy optimization model, and the particle group algorithm is used to solve a set of optimal station layout schemes, so that the movement of the robot Minimal energy consumption.
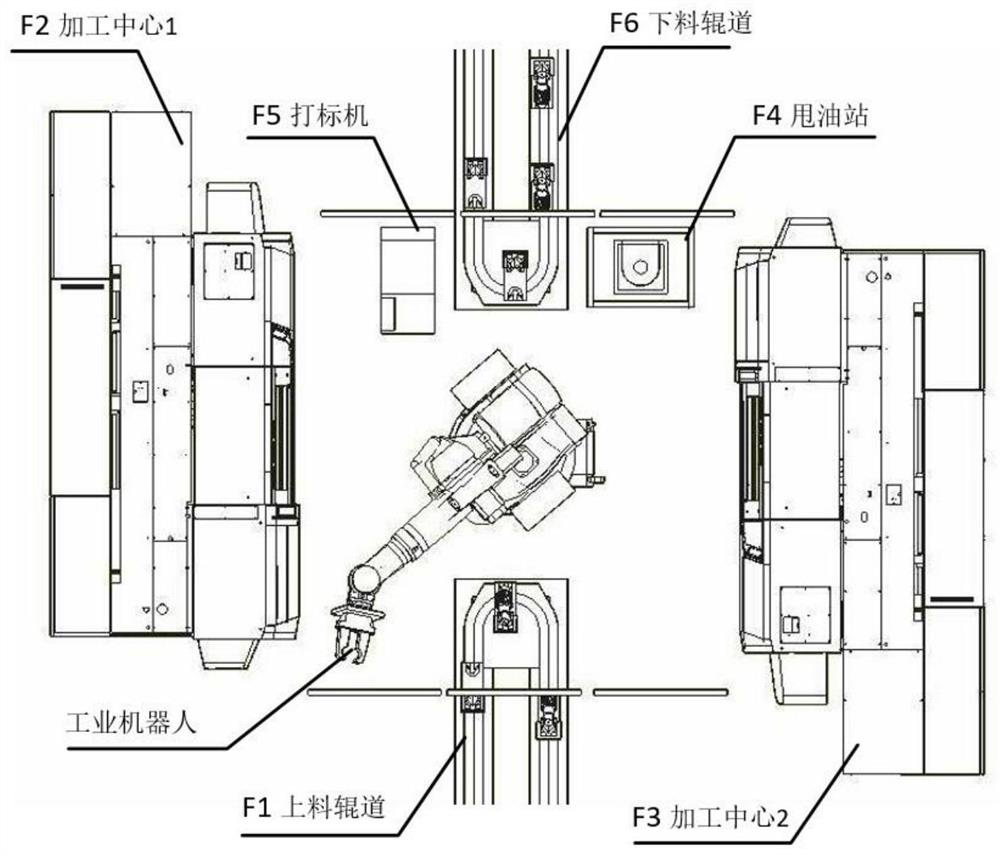
[0097] The goal of the layout problem is to determine the location of the object, and the traditional station layout requires that combined production experience is compact, reducing the floor area. This paper studies the layout problem of automated processing units with robots, and solices a minimal power consumption of robots. The processing units are continuously started, and the industrial robots are fixed inside the unit, and perform cyclical motion in accordance with certain laws, responsible for the flow of workpieces between the processing equipment. The equipment layout determines the start and end of the robot's motion path, which has a la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More