

Mechanical arm kinematics parameter calibration method based on inertial measurement unit
An inertial measurement unit and kinematic parameter technology, applied in the field of robotics, can solve the problems of high cost, low measurement efficiency, and small quantity, and achieve the effects of simple operation, simplified kinematics calibration steps, and reduced experimental cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
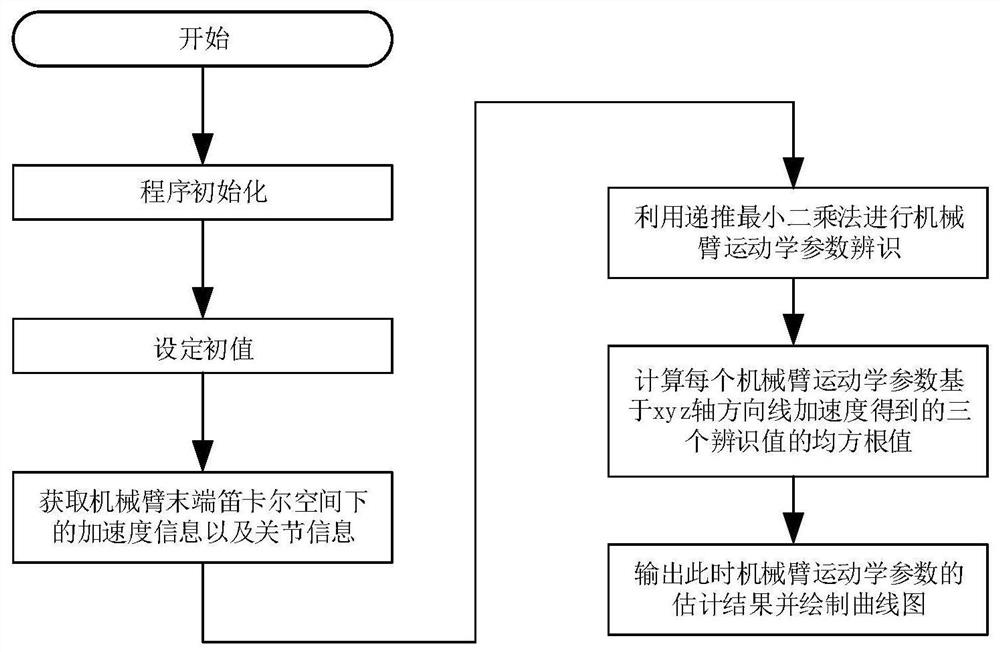
[0025] combine figure 1 Note that this implementation is based on the Jacobian matrix of the manipulator, and the Jacobian matrix is an expression that links the linear velocity in the Cartesian space at the end of the manipulator with the velocity in the joint space, as follows:
[0026]
[0027] In the formula: v and ω represent the linear velocity of the manipulator and the end angular velocity of the manipulator; J is the Jacobian matrix, q represents the joint angle, Indicates the joint angular velocity. Since the kinematic parameters of the manipulator to be estimated have nothing to do with the end angular velocity of the manipulator, this formula does not introduce the end angular velocity.
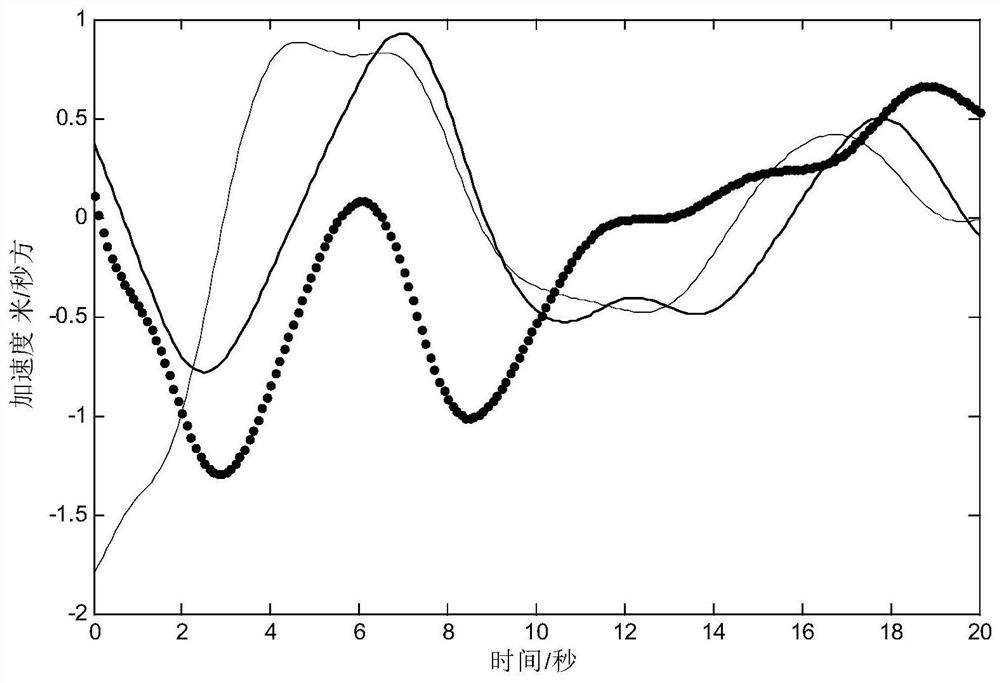
[0028] In order to establish the relationship expression between the linear acceleration of the end of the manipulator in Cartesian space and the kinematic parameters of the manipulator, it is necessary to derive the expression of the relationship between the linear velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More