

Binocular vision three-dimensional scanning system
A three-dimensional scanning and binocular vision technology, applied in the field of three-dimensional scanning, can solve cumbersome problems, and achieve the effects of easy portability, improved use distance and range, and rapid molding.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
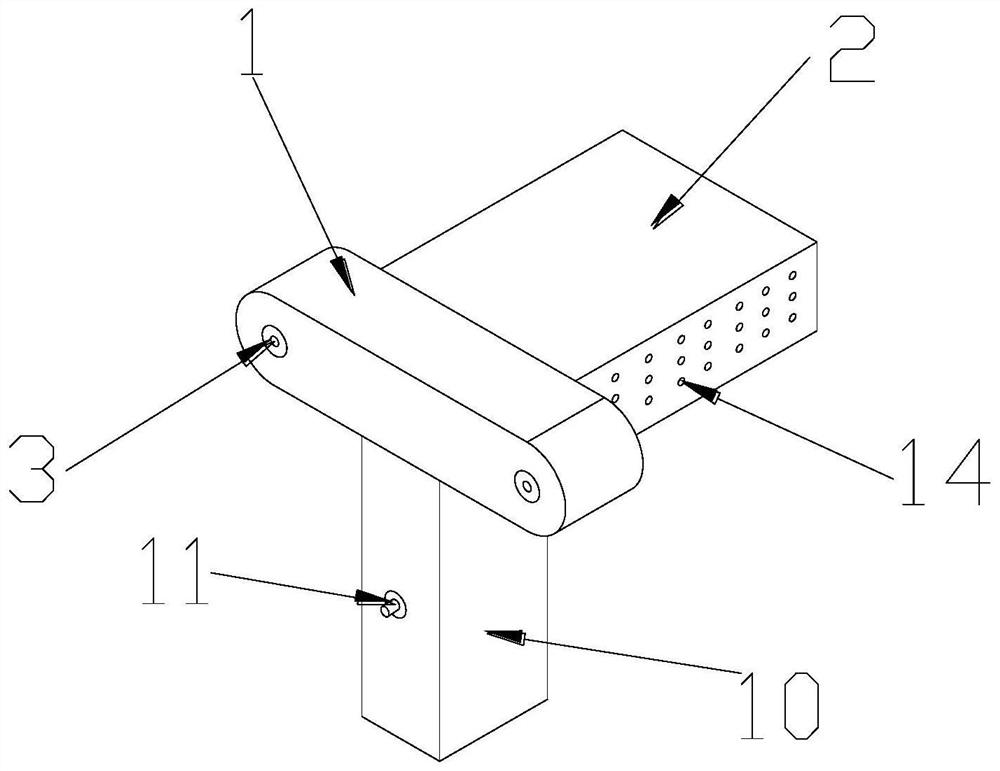
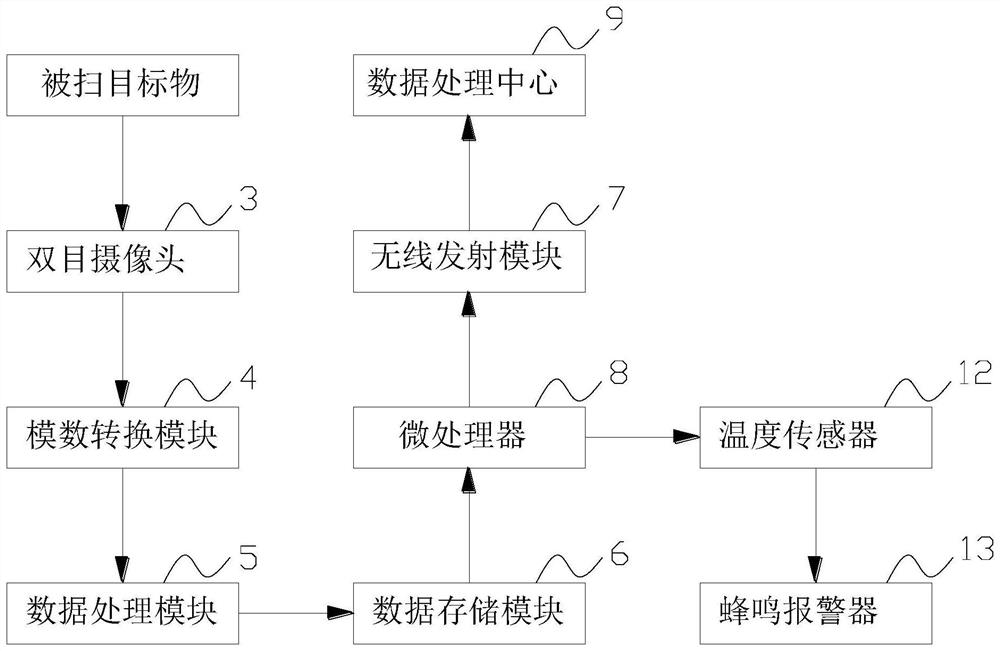
[0028] A binocular vision three-dimensional scanning system, please refer to the appendix figure 1 -Attached figure 2 As shown, it includes a scanner and a data processing center 9. The scanner includes a first casing 1 and a second casing 2. The second casing 2 is provided at the rear end of the first casing 1 and is connected with the first casing 1. The housing is formed in one piece, the first housing 1 is provided with a binocular camera 3, and the second housing 2 is provided with an analog-to-digital conversion module 4, a data processing module 5, a data storage module 6, a wireless transmission module 7 and a microprocessor 8, the binocular camera 3 is electrically connected with the analog-to-digital conversion module 4, the data processing module 5 is electrically connected with the analog-to-digital conversion module 4 and the data storage module 6 respectively, and the microprocessor 8 is respectively connected with the wireless transmission module 7 is electric...
Embodiment 2
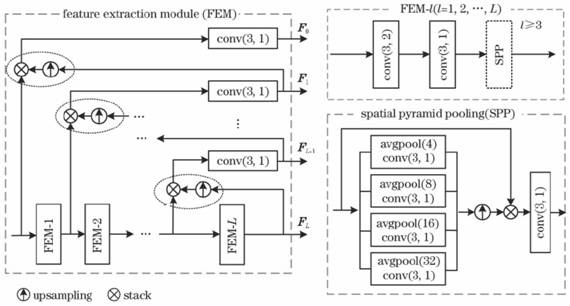
[0039] The data processing center 9 performs feature extraction (FEM), disparity initialization (DIM), and disparity refinement (DIM) on the received data, wherein FEM provides robust multi-scale features for DIM and DRM, and DIM uses in low-resolution levels A 3D convolutional neural network initializes disparity, and DRM uses a multi-branch fusion (MBF) module at multiple scales to progressively recover disparity map details.
[0040] Further, FEM adopts L group convolution to reduce the spatial resolution, and its structure is as follows image 3 As shown, the L groups of convolutions are denoted as FEM-l (l=1, 2, ..., L), which both contain two convolution layers with a kernel size of 3, and the convolution strides are 2 and 1, respectively. Represents image features output by FEM at multiple resolution levels. In order to ensure the operating efficiency of the algorithm and fuse multi-scale features at the same time, the SPP (spatial pyramid pooling) layer is introduced ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More