

Visual sensor laser radar fused unmanned aerial vehicle positioning and mapping device and method
A vision sensor, lidar technology, applied in the field of vision sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
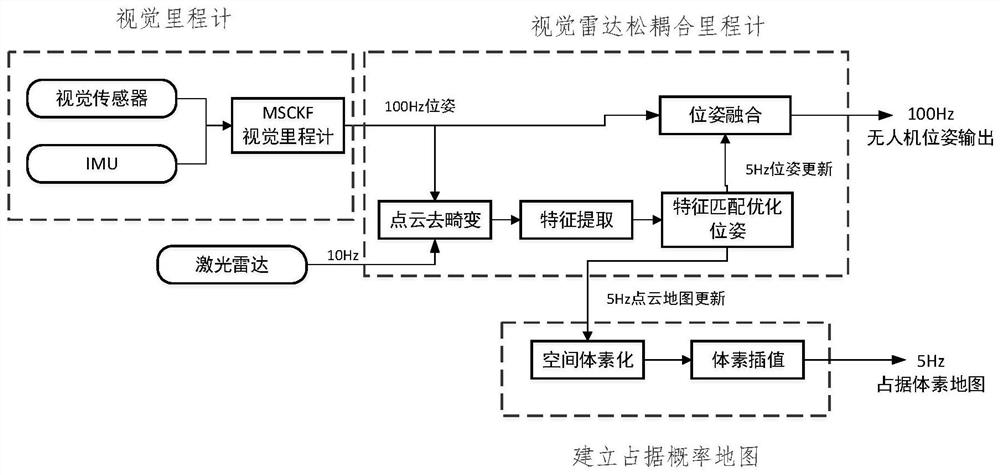
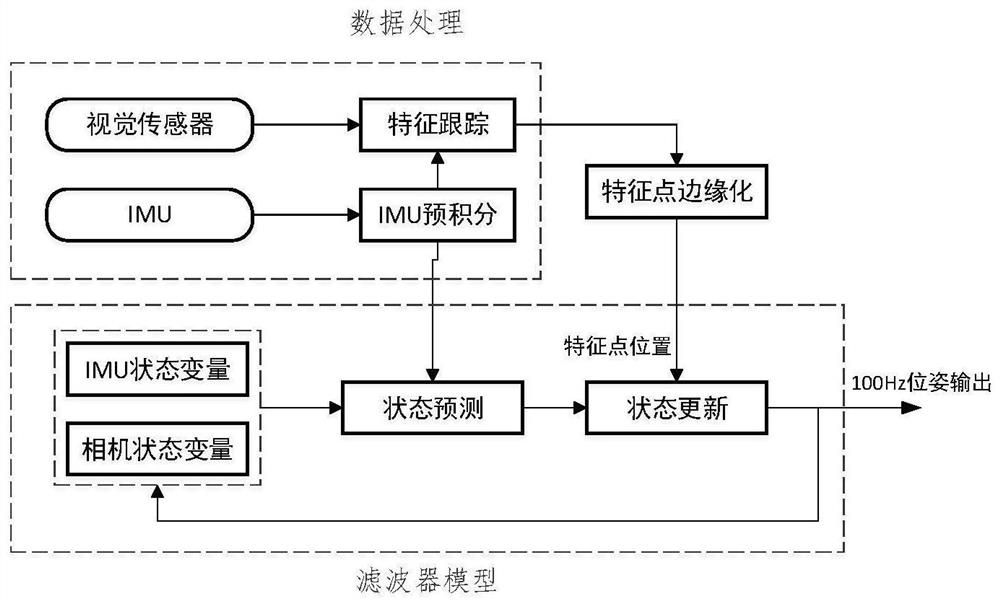
[0074] The UAV autonomous positioning and mapping system based on visual radar fusion proposed by the present invention is mainly composed of hardware parts and algorithm parts.
[0075] The hardware part includes binocular camera, 3D lidar, IMU inertial measurement unit, embedded onboard processor and UAV platform. The binocular camera collects the visual information of the surrounding environment, with high measurement frequency and rich information. 3D lidar is mainly used to measure the 3D position information of the surrounding environment of the UAV, with high measurement accuracy and large coverage, and can release the environmental information in the form of 3D point cloud data; The acceleration and angular velocity information of the drone itself; the embedded onboard processor is mainly used for algorithm operation. By processing the data collected by the camera, radar and IMU, it runs the autonomous positioning and mapping algorithm to obtain the drone's own pose an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More