

CT real-time positioning accurate puncture robot
A real-time positioning and robot technology, applied in the field of medical robots, can solve problems such as operator exposure, achieve the effects of simplifying positioning operations, reducing labor intensity, and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The meaning of the term "CT" used in the present invention is CT (Computed Tomography), that is, electronic computer tomography, which refers to the use of precisely collimated X-ray beams, γ-rays, ultrasonic waves, etc., together with highly sensitive detectors to surround An image inspection technique that scans sections of a certain part of the human body one by one. According to the different rays used, it can be divided into: X-ray CT (X-CT) and gamma-ray CT (γ-CT).
[0038] The terms "proximal end" and "distal end" used in the present invention refer to the positional relationship relative to the CT machine, that is, the end close to the CT machine is the proximal end, and the end far away from the CT machine is the far end.
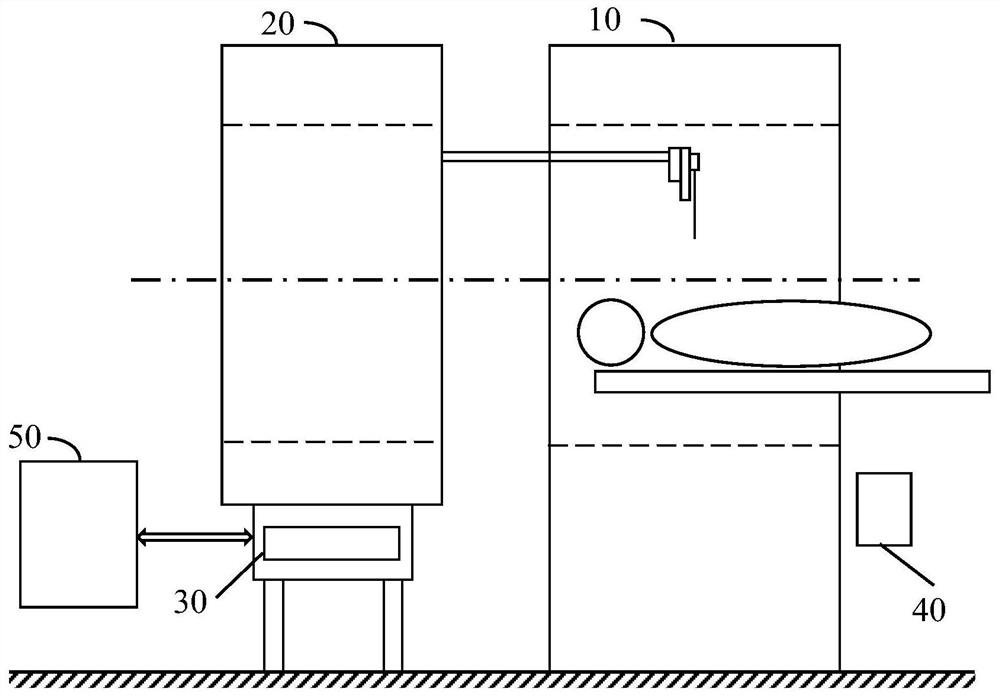
[0039] as attached figure 1 As shown, a CT real-time positioning precise puncture system according to the present invention includes: a CT scanning device 10 , a puncture robot 20 , a control system 30 , an equal volume aspirator 40 , and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More