Design method of LQG controller of LPV system based on data driving
A data-driven, design method technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of hysteresis, inconvenient calculation, large order of large-scale dynamic system, etc., to reduce the degree of interference, The effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with accompanying drawing.
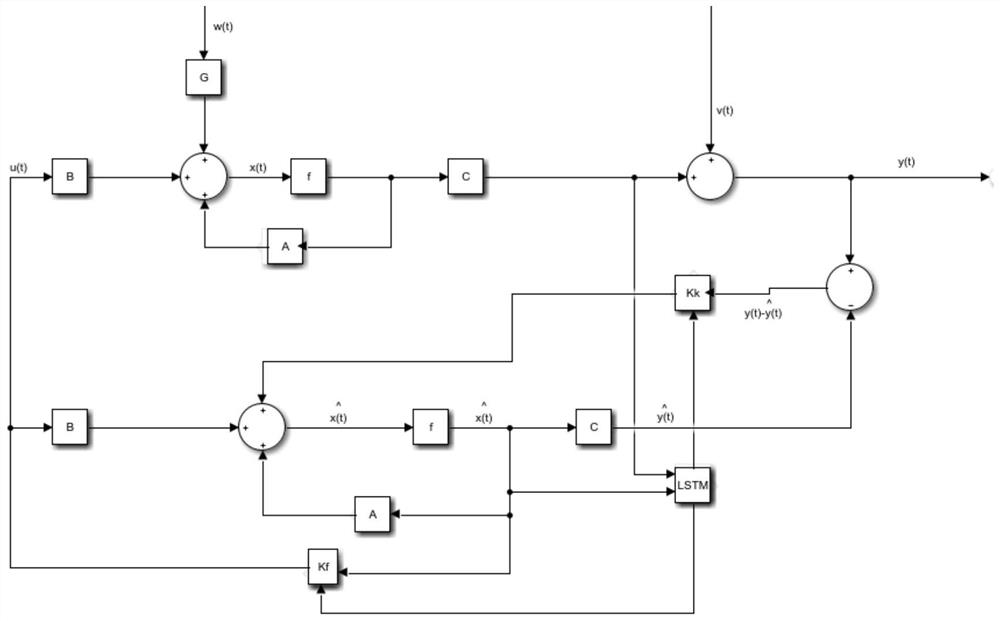
[0017] Such as figure 1 Shown, the design of controller of the present invention comprises as follows:
[0018] Step1: Establish system equations
[0019] For large dynamic systems with time-varying parameters, the following system equations are established:
[0020] x(t;q(t))=A(q(t)x(t;q(t))+Bu(t;q(t))+w(t)
[0021] y(t; q(t)) = Cx(t; q(t)) + v(t)
[0022] Among them, assuming all t>0, the system matrix A(q(t))∈R n×n By the time-varying parameter q(t)∈R d Determined, so as to obtain the time-varying system matrix, the input matrix B∈R n×n and the output matrix C ∈ R n×n are considered fixed. Control input u(t; q(t)) ∈ R m , the controlled output y(t; q(t))∈R p , and the state quantity x(t; q(t))∈R n Depending on the parameters, w(t), v(t) are the measurement noise and observation noise in the stochastic process, respectively. The present invention assumes that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More