

3D object detection method based on monocular camera
A monocular camera and object detection technology, applied in the field of 3D object detection, can solve problems such as endangering the safety and reliability of horizontal and vertical control driving, passenger discomfort or injury, and inaccurate predictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] This embodiment provides a 3D object detection method based on a monocular camera, and the implementation of the method is mainly based on a vehicle-mounted camera and a vehicle-mounted laser radar. There can be one or more car cameras and car lidars, and the number is not limited. The on-board camera and on-board lidar should be installed on the same side of the test vehicle as possible, or in a similar position, so as to obtain the original image data and lidar data from the same angle.
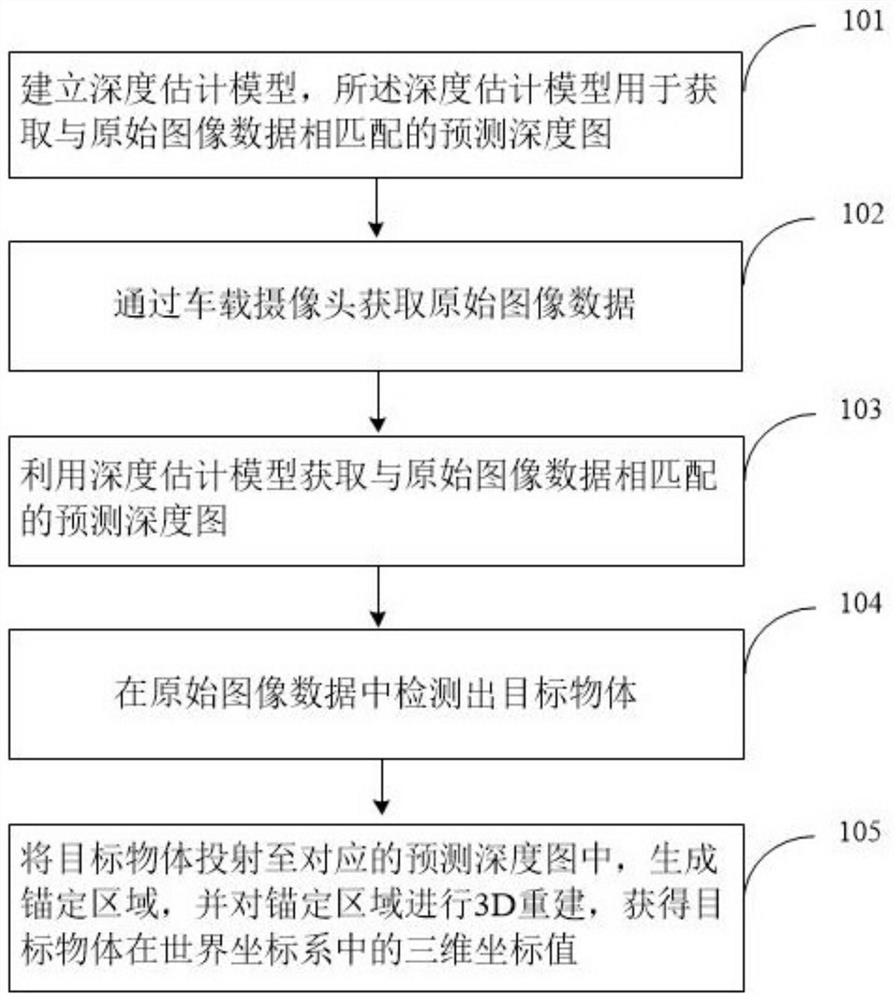
[0059] Such as Figure 1-Figure 6 As shown, a 3D object detection method based on a monocular camera includes the following steps:
[0060] 101. Establish a depth estimation model, where the depth estimation model is used to obtain a predicted depth map matched with original image data.
[0061] The main purpose of establishing a depth estimation model is to quickly obtain a predicted depth map that matches the original image data. In the specific process of establishing the depth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More