

Non-contact flexible transparent sensor and preparation method thereof
A non-contact, sensor technology, applied in the field of flexible sensors, can solve the problems of difficult monitoring, weak output induction signal, and difficult integration of external equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] 1) Place the PET substrate in an inductively coupled plasma etching chamber, introduce oxygen into the vacuumed chamber, and then apply a power of 150W to etch for 150s to realize the preliminary nanostructure design of the substrate;
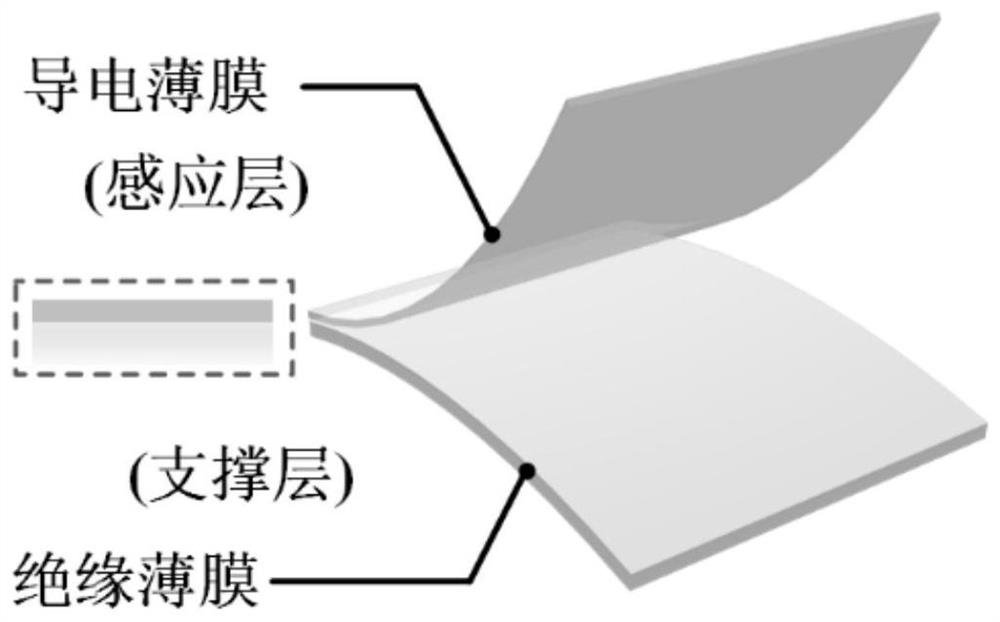
[0050] 2) Transfer the rough surface to the coating equipment. After vacuuming the cavity, deposit the conductive transparent material ITO on the surface of the sample to form an induction layer. The type and thickness of the deposited film can be controlled by controlling the type of target and the deposition time;
[0051] 3) Prepare signal output electrodes at the four ends of the sensor for outputting horizontal and vertical signals;
[0052] 4) By collecting and analyzing the four-terminal output signals, the corresponding operation commands are realized.
Embodiment 2
[0054] 1) Place the PDMS substrate in an inductively coupled plasma etching chamber, introduce oxygen into the vacuumed chamber, and then apply a power of 100W to etch for 200s to realize the preliminary nanostructure design of the substrate;
[0055] 2) Transfer the rough surface to the coating equipment. After vacuuming the cavity, deposit the conductive transparent material ITO on the surface of the sample to form an induction layer. The type and thickness of the deposited film can be controlled by controlling the type of target and the deposition time;
[0056] 3) Prepare signal output electrodes at the four ends of the sensor for outputting horizontal and vertical signals;
[0057] 4) By collecting and analyzing the four-terminal output signals, the corresponding operation commands are realized.
Embodiment 3
[0059] 1) The glass substrate is placed in the reactive ion etching chamber, and the SF 6 Pass it into the vacuumed cavity, and then apply a power of 120W to etch for 150s to realize the preliminary structural design of the substrate;
[0060] 2) Transfer the rough surface to the coating equipment. After vacuuming the cavity, deposit the conductive transparent material ITO on the surface of the sample to form an induction layer. The type and thickness of the deposited film can be controlled by controlling the type of target and the deposition time;
[0061] 3) Prepare signal output electrodes at the four ends of the sensor for outputting horizontal and vertical signals;
[0062] 4) By collecting and analyzing the four-terminal output signals, the corresponding operation commands are realized.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More