

Neutral-floatage U-boat with canard arrangement, its navigation depth and suspending stop control thereof
A submarine and buoyancy technology, applied in the direction of underwater ships, ships, underwater operation equipment, etc., can solve the problems of inability to guarantee the attitude level, poor maneuverability, low control efficiency, etc., and achieve good application prospects and economic and hydrodynamics. The effect of good performance and high control efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
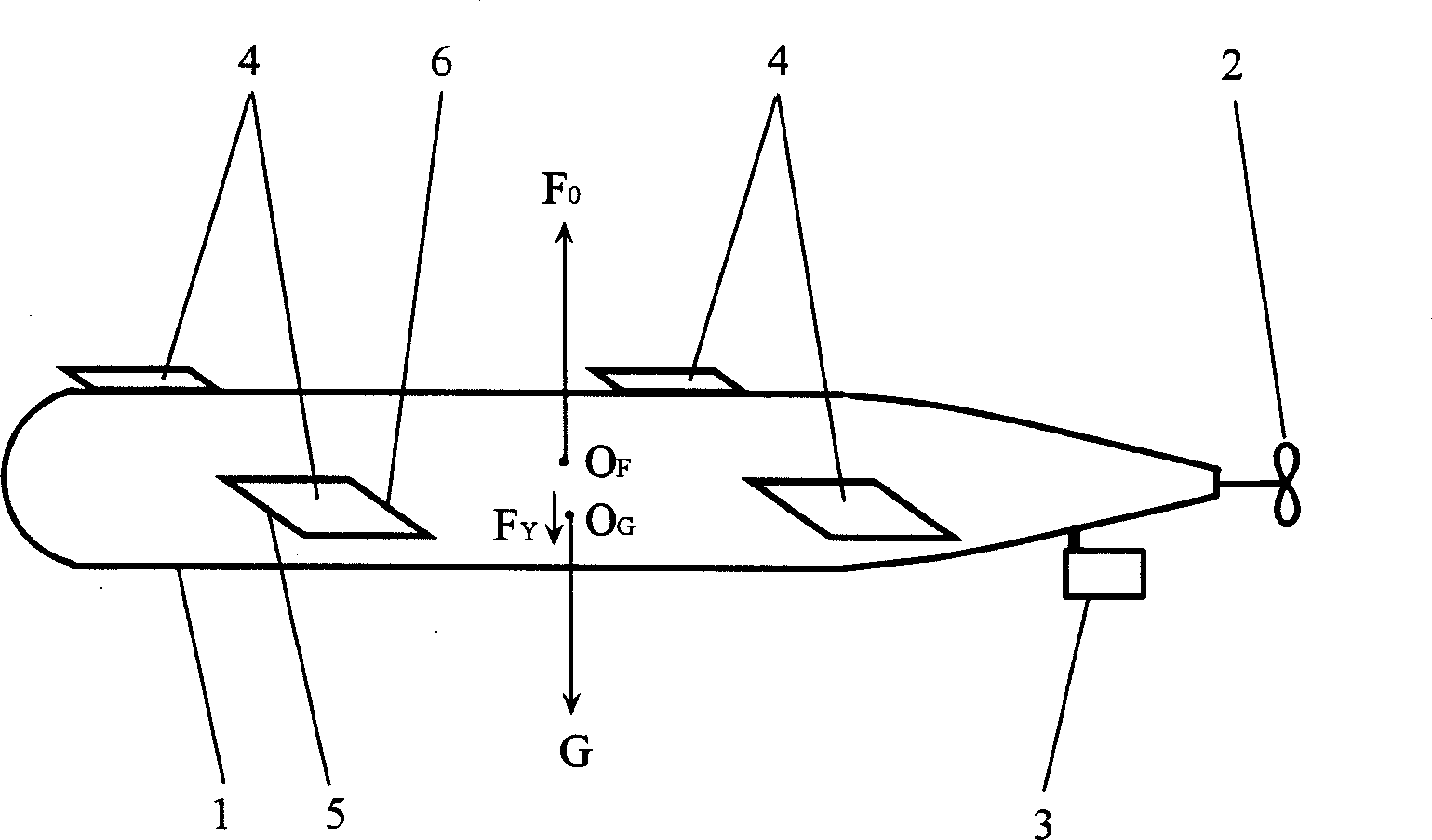
[0022] figure 1 In the external structure diagram of the shown embodiment, the rudder is under the rear part of the boat, and the propeller is positioned at the afterbody of the boat. The elevator is rectangular and parallel linkage. The center of gravity of the boat is at O G point, the center of buoyancy is at O F point, o F point at O G Click above. Buoyancy is F 0 , the gravity is G, the lines of action of the two forces are approximately coincident, satisfying F 0 ≈G and F 0 >G relationship. The resultant force F of the vertical component forces generated by the water on the four elevators Y Approximately passing through the center of gravity O G .
[0023] Figure 4 In the block diagram of the embodiment of the submarine voyage depth control system shown, the voyage depth sensor is a pressure sensor, the voyage depth controller is a computer, the elevator steering gear is an electric steering gear, and the control law is realized by computer software. Becaus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More