

Micro integrated global positioning system/inertial measurement unit system
a global positioning system and integrated technology, applied in wave based measurement systems, navigation instruments, instruments, etc., can solve the problems of drift in output (position, velocity, attitude, etc.), inability to directly obtain the position rate measurement from the platform, and complex gimbaled inertial navigation systems. achieve the effect of high accuracy, position, velocity, attitude and heading measuremen
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
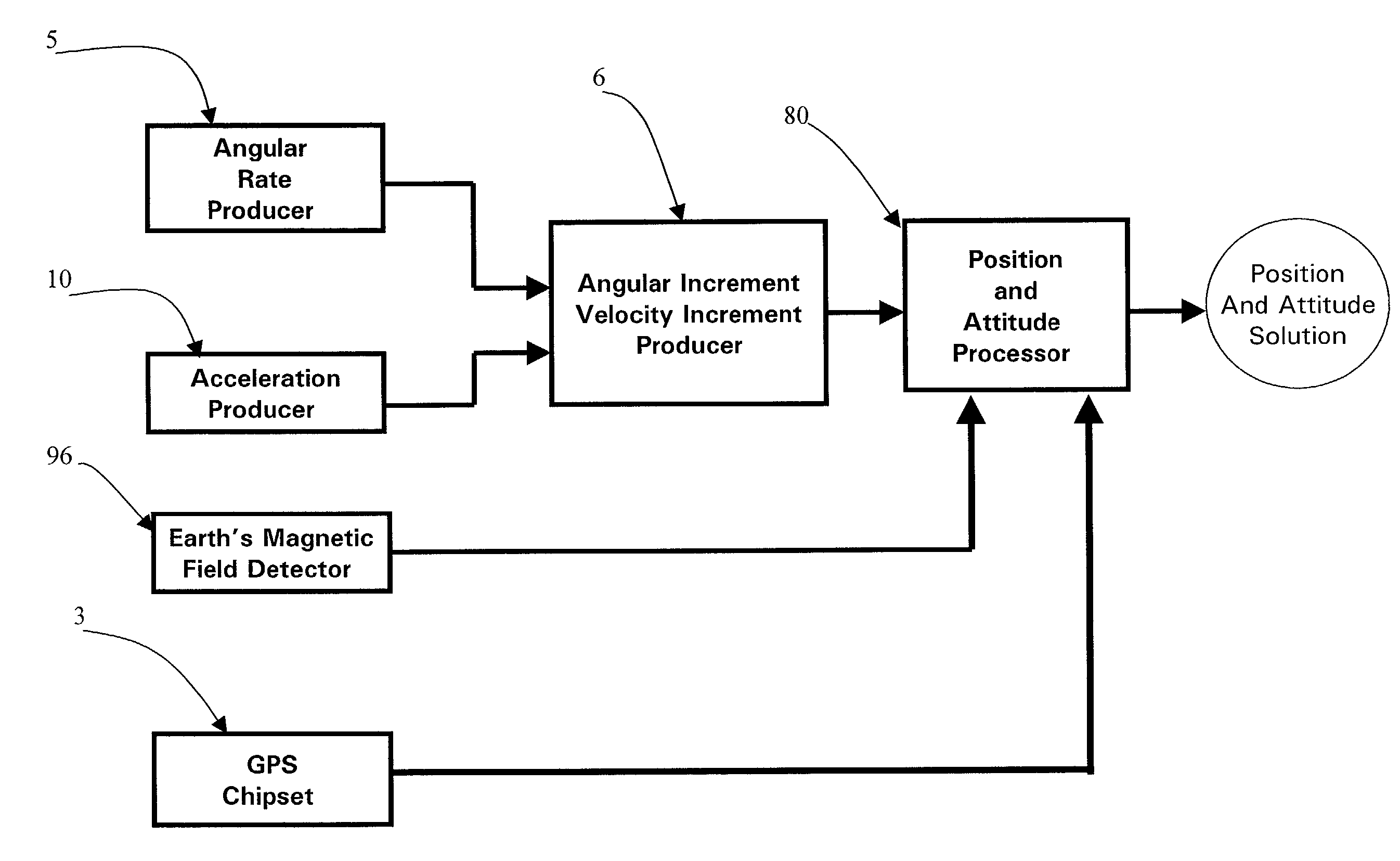
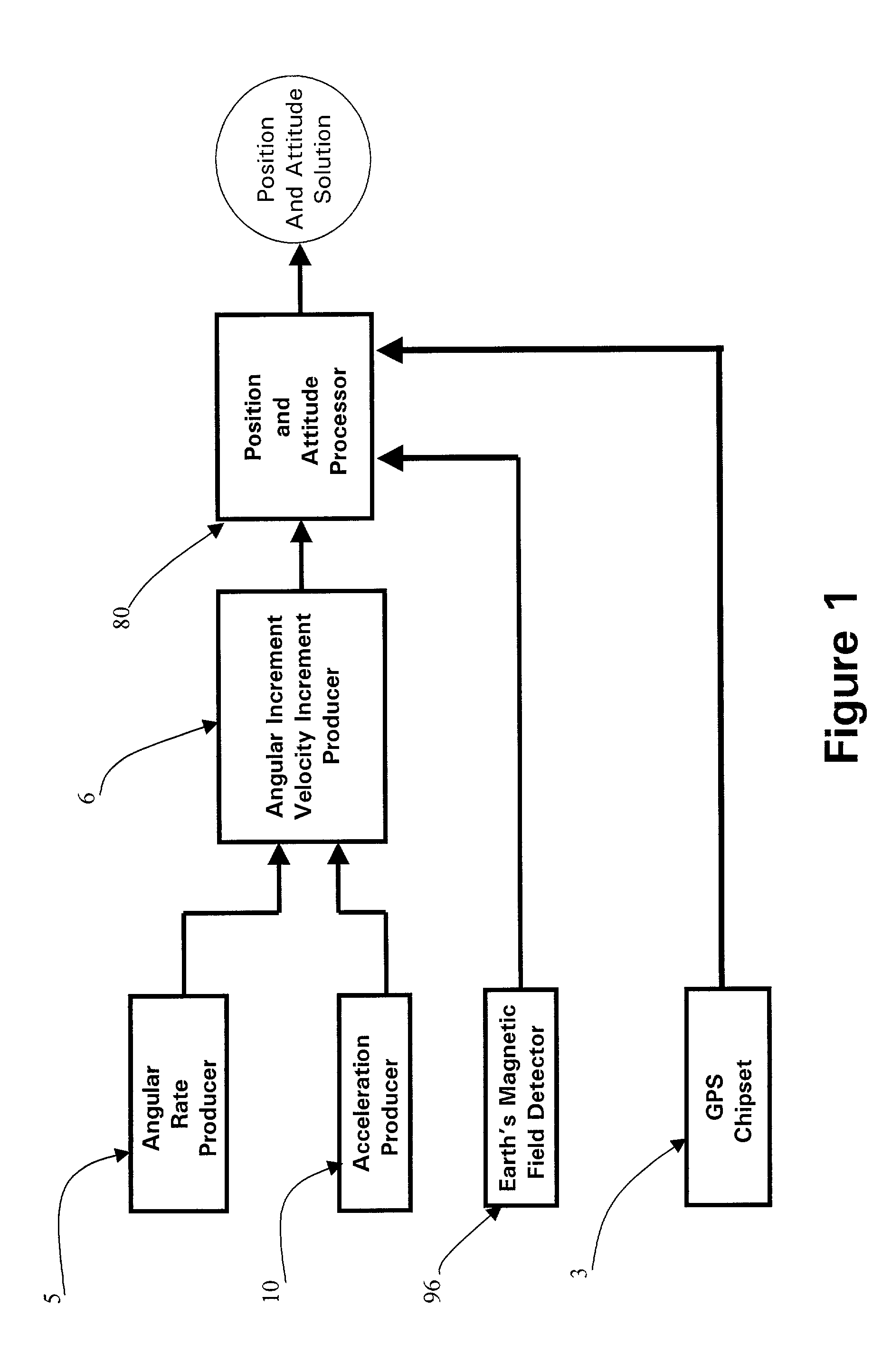
[0086] The present invention provides a micro integrated GPS / IMU system to blend raw motion measurements from the micro inertial measurement unit and a GPS chipset to improve the accuracy of the position, velocity, and attitude solution deduced from raw motion measurements for the micro inertial measurement unit only, in order to output highly accurate GPS / IMU mixed navigation solution.
[0087] Referring to FIG. 1, the micro integrated GPS / IMU system of a carrier, which comprises a body frame, comprises:
[0088] an angular rate producer 5, producing orthogonal three-axis (X axis, Y axis and Z axis) electrical angular rate signals;
[0089] an acceleration producer 10, producing orthogonal three-axis (X-axis, Y axis and Z axis) electrical acceleration signals;
[0090] an angular increment and velocity increment producer 6, converting the three-axis electrical angular rate signals into digital angular increments and for converting the three-axis electrical acceleration signals into digital vel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More