

Control experimental device for under-actuated suspension swing motion
A technology of motion control and experimental equipment, which is applied in the direction of educational appliances, instruments, teaching models, etc., can solve the problems of insufficient intuitive understanding of relevant theories, stay at the level of numerical simulation, and disconnection between theory and practice, and achieve compact structure and strong anti-interference ability , low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
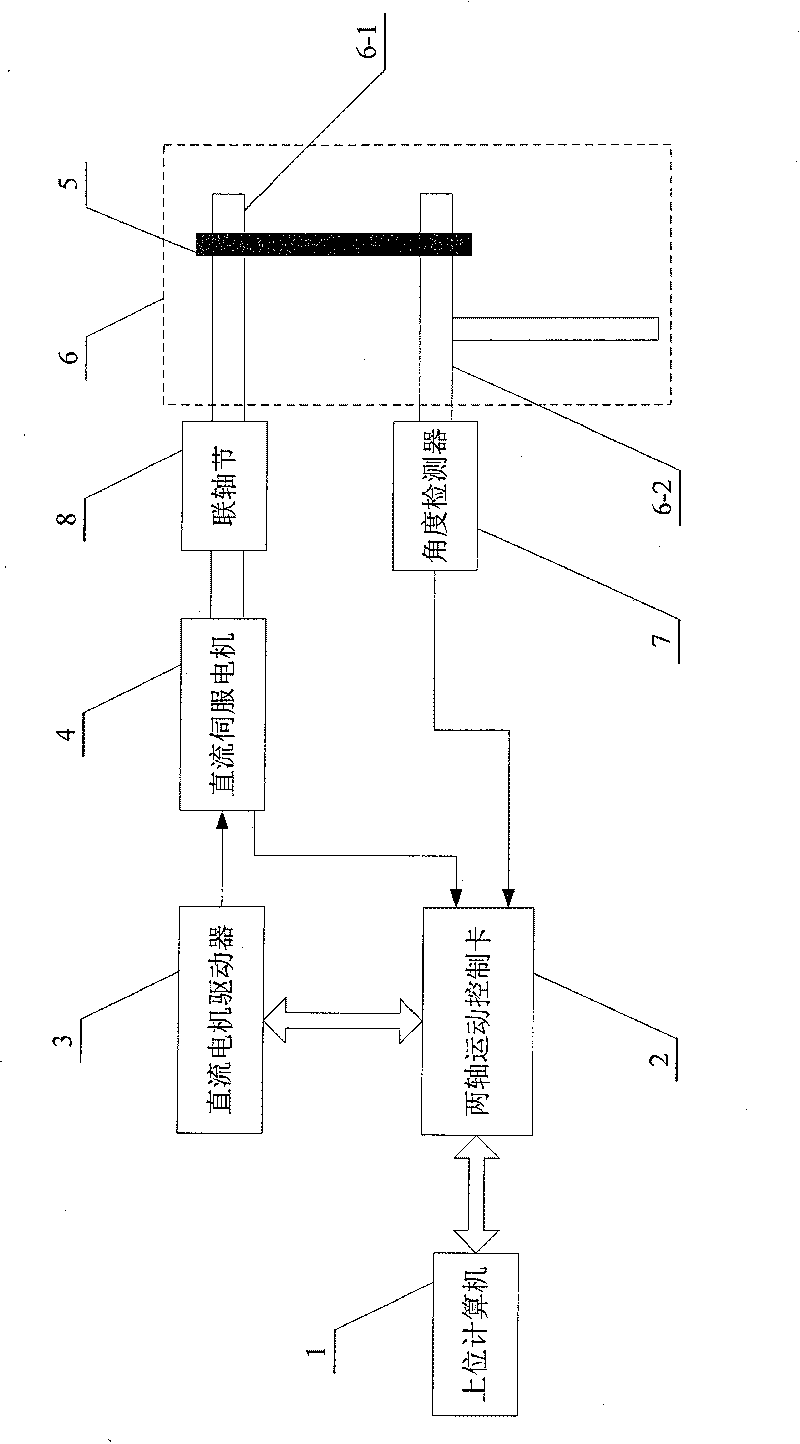
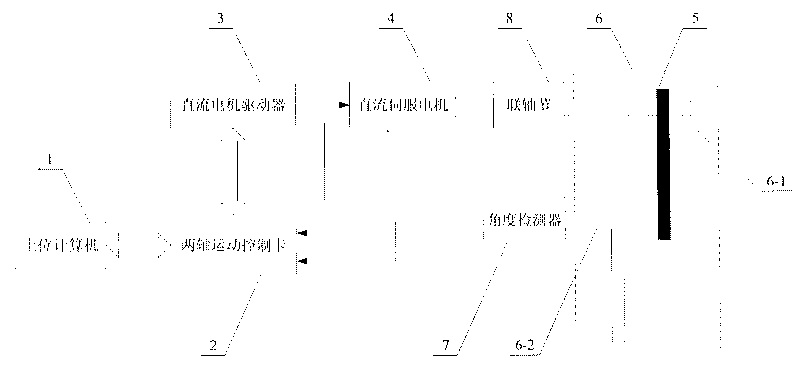
[0007] Specific implementation mode one: see figure 1 , this embodiment is composed of host computer 1, two-axis motion control card 2, DC motor driver 3, DC servo motor 4, synchronous transmission mechanism 5, underactuated pendulum mechanism 6 and angle detector 7, the input and output of host computer 1 The terminal is connected to the upper input and output terminals of the two-axis motion control card 2, the drive input and output terminals of the two-axis motion control card 2 are connected to the input and output terminals of the DC motor driver 3, and the control output terminal of the DC motor driver 3 is connected to the DC servo motor 4 The control input terminal of the DC servo motor 4 is connected to the signal output terminal of the two-axis motion control card 2, and the output shaft of the DC servo motor 4 is connected to the input shaft of the underactuated pendulum mechanism 6 through the coupling 8 Connected, the input driving torque of the input shaft 6-1 o...
specific Embodiment approach 2
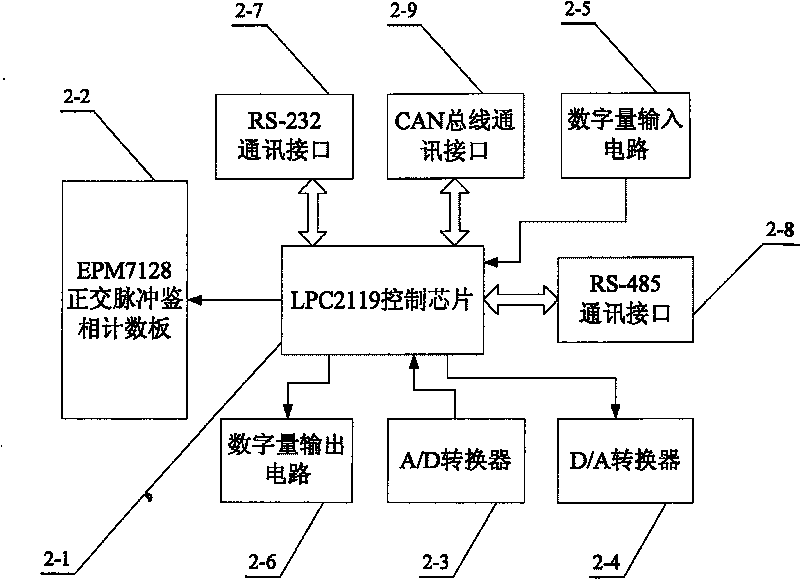
[0010] Specific implementation mode two: see figure 2 The difference between this embodiment and the first embodiment is that the two-axis motion control card 2 is composed of an LPC2119 control chip 2-1, an EPM7128 quadrature pulse phase detection counting board 2-2, an A / D converter 2-3, D / A converter 2-4, digital input circuit 2-5, digital output circuit 2-6, RS-232 communication interface 2-7, RS-485 communication interface 2-8 and CAN bus communication interface 2-9 Composition, EPM7128 quadrature pulse phase detection counting board 2-2 is connected with the pulse phase detection signal output port of LPC2119 control chip 2-1, A / D converter 2-3 is connected with the modulus SPI port of LPC2119 control chip 2-1 , the D / A converter 2-4 is connected to the digital-analog SPI port of the LPC2119 control chip 2-1, the digital quantity input circuit 2-5 is connected to the digital quantity input port of the LPC2119 control chip 2-1, and the digital quantity output circuit 2- ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More