

Control method of permanent magnetic bearing-free permanent magnetic synchronous motor non-radial displacement transducer
A radial displacement, synchronous motor technology, used in motor generator control, electronic commutation motor control, electronic commutator and other directions, can solve the disadvantages of bearingless motor miniaturization, high power, high speed development, signal accuracy and Poor stability, expensive displacement sensor, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] A preferred embodiment of the present invention is described as follows in conjunction with accompanying drawing:
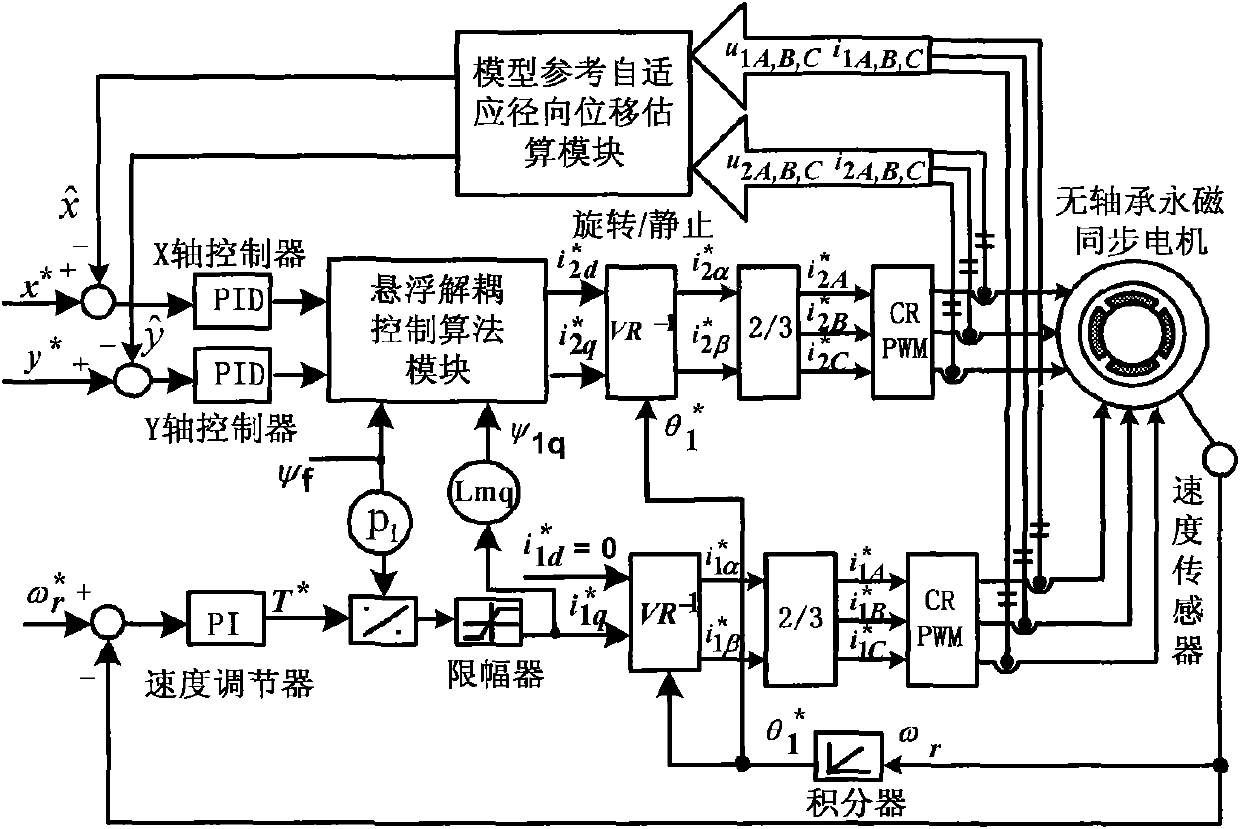
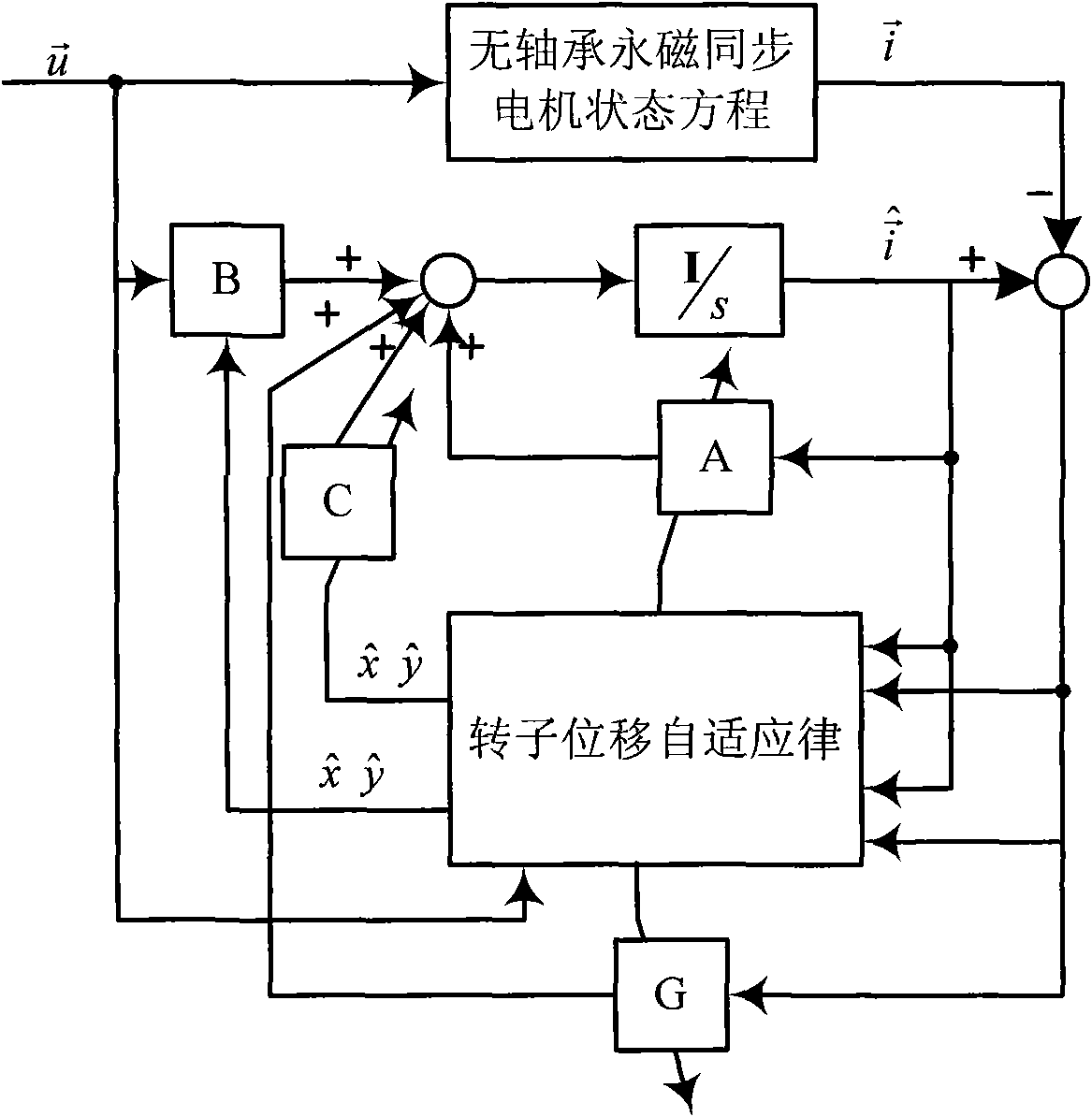
[0034] Such as figure 1 As shown, the permanent magnet bearingless synchronous motor without radial displacement sensor control method, by detecting the three-phase voltage and current of the torque control winding and the suspension control winding, using the model reference self-adaptive principle, constructing a model reference self-adaptive radial Displacement estimation module, the radial displacement of the rotor is estimated by the model reference adaptive radial displacement estimation module and and the displacement signal and Respectively with the reference displacement signal x of the given permanent magnet bearingless motor rotor * and y* For comparison, the given suspension force F of the x-axis and y-axis are respectively obtained after adjustment by the displacement ring PID regulator x * and F y * , and then the given three-phas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More