

Blind autonomous navigation method based on stereoscopic vision and information fusion
A technology of stereo vision and autonomous navigation, applied in the field of navigation system, can solve the problems such as difficult separation of main objects, lack of autonomous navigation algorithm, increase of obstacle misjudgment rate, etc., so as to improve autonomy and independent walking ability, application prospect Visible, performance-enhancing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will now be described in further detail in conjunction with the accompanying drawings and preferred embodiments. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
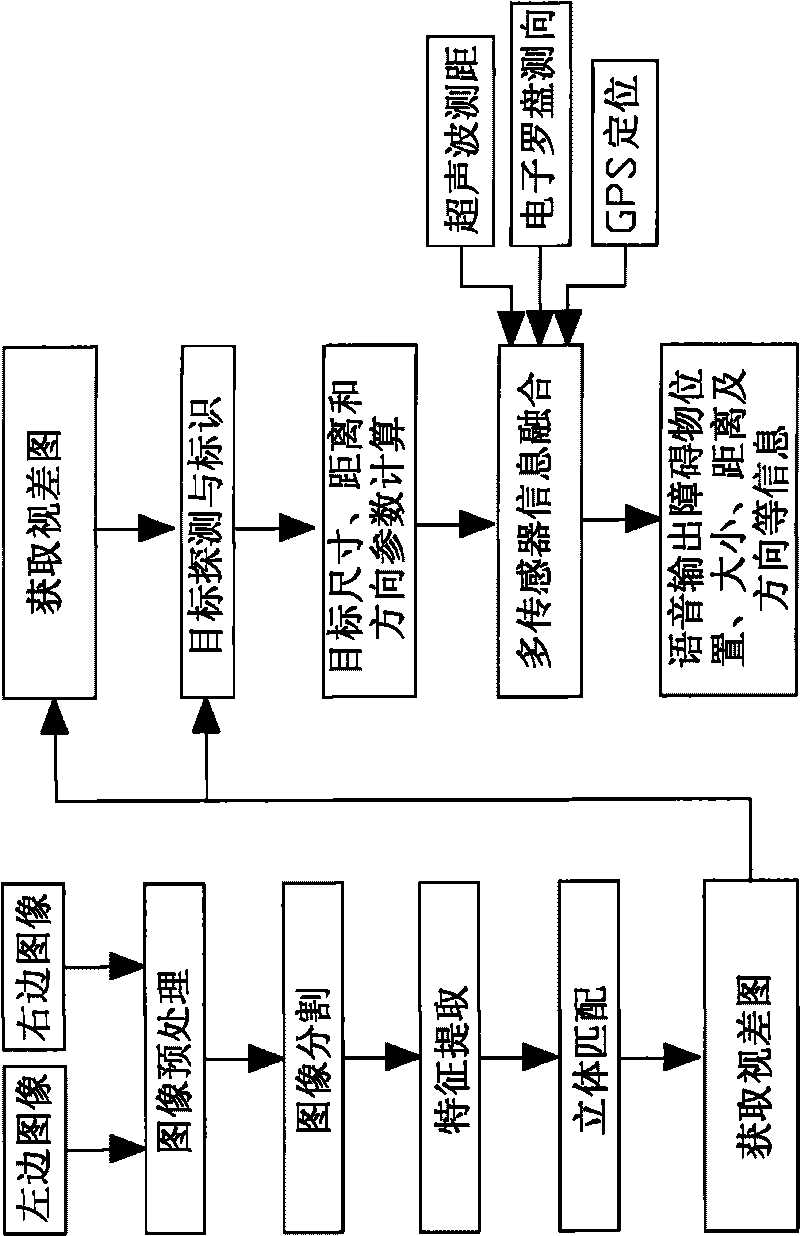
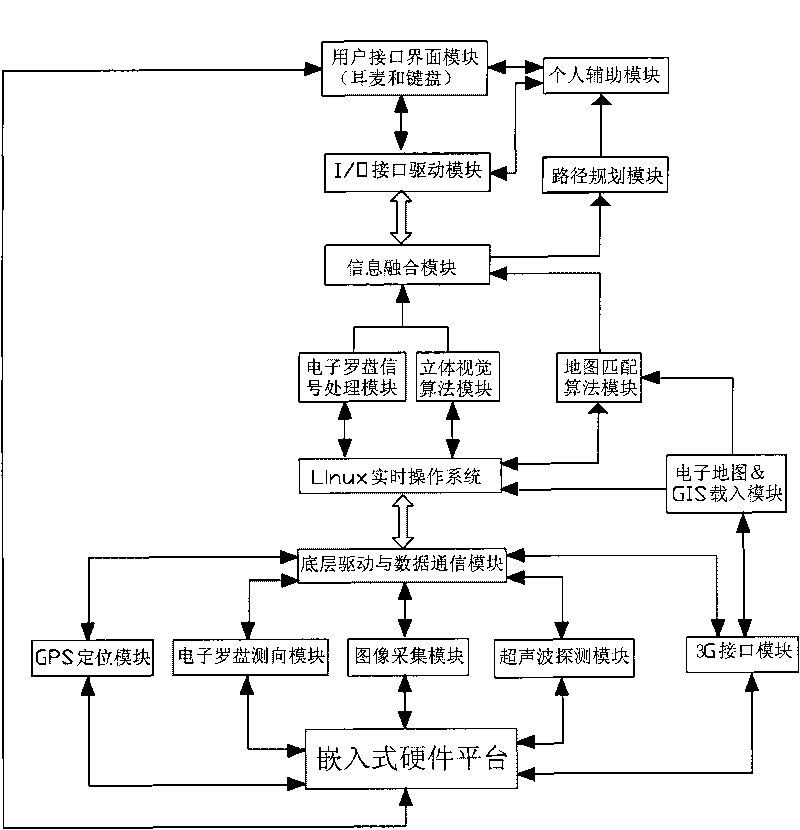
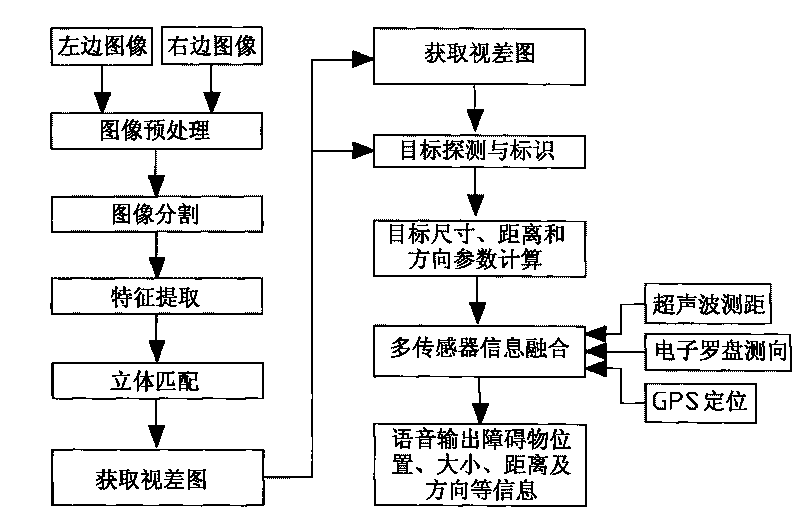
[0020] figure 2 It is a schematic diagram of the system software of the present invention. In the figure, a system software structure is built based on an embedded hardware platform and a Linux real-time operating system, mainly divided into multi-sensor data acquisition, data communication and transmission storage, information processing and fusion, information display and user interface. parts. The navigation algorithm mainly focuses on stereo vision and multi-sensor information fusion. The algorithm flow chart is as follows: figure 1 As shown in the figure, the output of the left image and the right image are mainly co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More