

Drive device for an alternating current motor and an electric motor vehicle
一种交流电动机、驱动装置的技术,应用在交流电动机控制、控制机电传动装置、抑制电动机振动控制等方向,能够解决处理困难、不能说有实用性、谐波电流增加等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
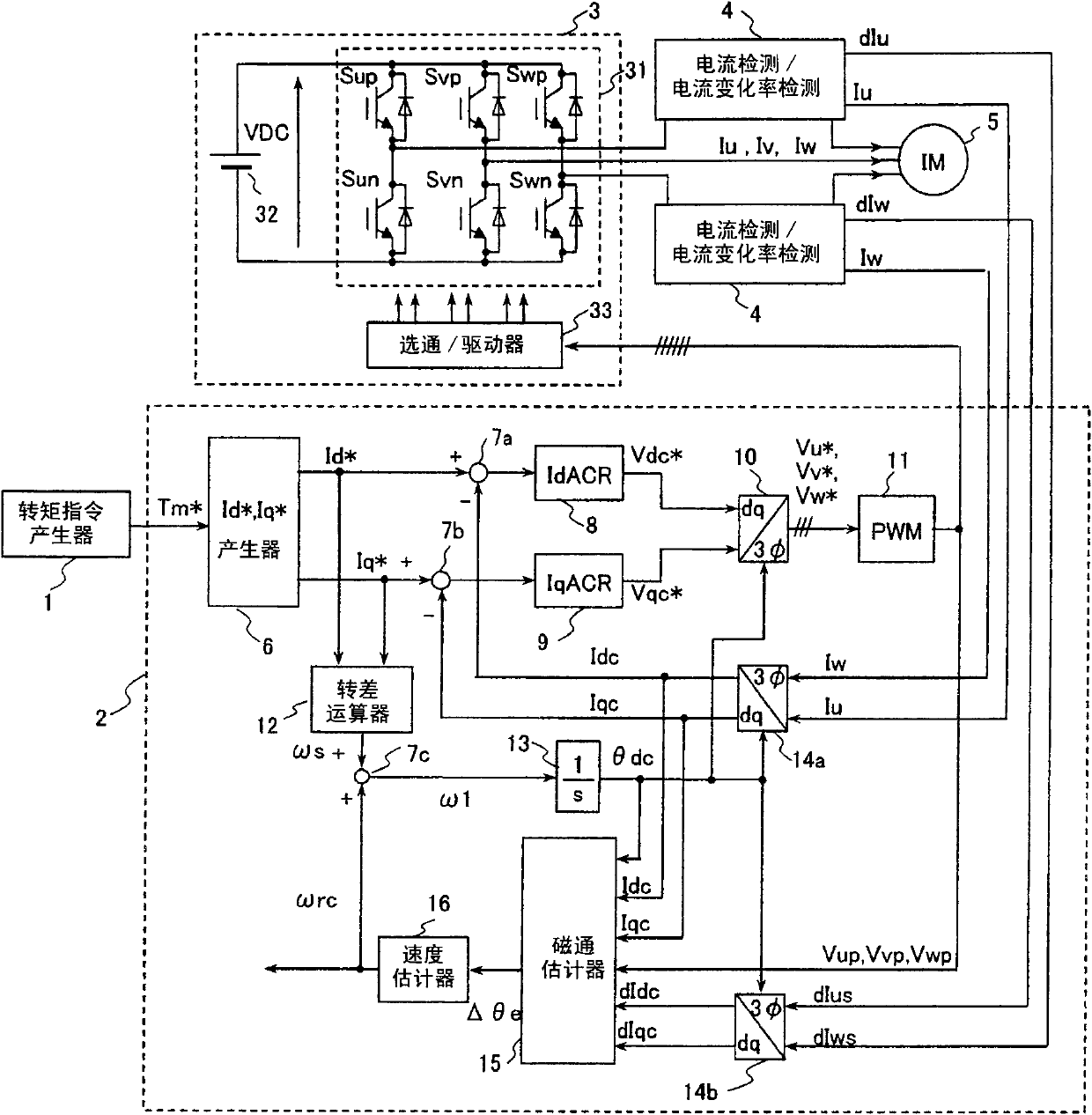
[0114] figure 1 It is a block diagram showing the configuration of the AC motor drive device according to the first embodiment of the present invention.
[0115] The purpose of this device is to drive a three-phase induction motor. The device generally includes a torque command generator 1; a controller 2; an inverter 3 comprising an inverter main circuit 31, an inverter power supply 32, and a gate / driver (gate / driver) 33; the current and the rate of change of the current A detector 4; and a three-phase induction motor 5 (hereinafter abbreviated as an induction motor) to be driven are constituted.
[0116] The torque command generator 1 is a means for giving the generation torque command Tm* to the induction motor 5 , and is a higher-level controller than the controller 2 . A speed controller for adjusting the rotation speed of the induction motor 5 may be provided at a higher level of the torque command generating device, but this is omitted in this embodiment.
[0117] Th...
Embodiment 2
[0135] Next, Embodiment 2 of the present invention will be described.
[0136] In the first embodiment, the controller 2 has been described with an analog circuit, but in order to realize digital control, high-speed processing is required. Of course, it is not impossible to realize digitalization if a dedicated gate logic is used, but in this case, the circuit scale will become huge.
[0137] In Example 2, on the premise of computers used in industrial applications, etc., the Figure 6 ~ Figure 10 A practical example is shown.
[0138] Image 6 It is a block diagram showing a controller 2B which is a characteristic part of the second embodiment. Replace this controller 2B figure 1 Introduced by the controller 2 in the system, Embodiment 2 is constituted.
[0139] exist Image 6 , for modules with part numbers 6 to 14 and 16, are the same as figure 1 Like numbered blocks shown are like blocks. The characteristic parts of this embodiment are the magnetic flux calculator ...
Embodiment 3
[0150] Next, Embodiment 3 of the present invention will be described.
[0151] In Embodiments 1 and 2, the control object is an induction motor, and in Embodiment 3, a permanent magnet synchronous motor (hereinafter abbreviated as a PM motor) is used. Compared with induction motors, PM motors can achieve smaller size and higher efficiency, so in the future, the applications that can be applied are expected to expand further.
[0152] Figure 11 It is a configuration diagram of the third embodiment. With embodiment 2 ( Image 6 ) is recorded on the basis. Controller 2C and Image 6 The controller 2B is roughly the same, except that the slip calculator 12 is deleted, there is no change. In addition, the motor is a PM motor 5C.
[0153] In the PM motor, since the drive frequency ω1 and the frequency ωrc of the rotational speed are necessarily synchronized, there is no need to add the slip frequency, and the control structure becomes more simplified. That is, the driving sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More