

Multifunctional flexible touch sensor
A tactile sensor, multi-functional technology, applied in the field of sensing, can solve the problem of no temperature detection and three-dimensional force flexible multi-functional tactile sensor, tactile sensor measurement pressure and temperature information limitation, and the reliability of robots and operating objects cannot be guaranteed. , to achieve the effects of multi-sampling resistance components, improving measurement accuracy and stability, and reducing cross-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
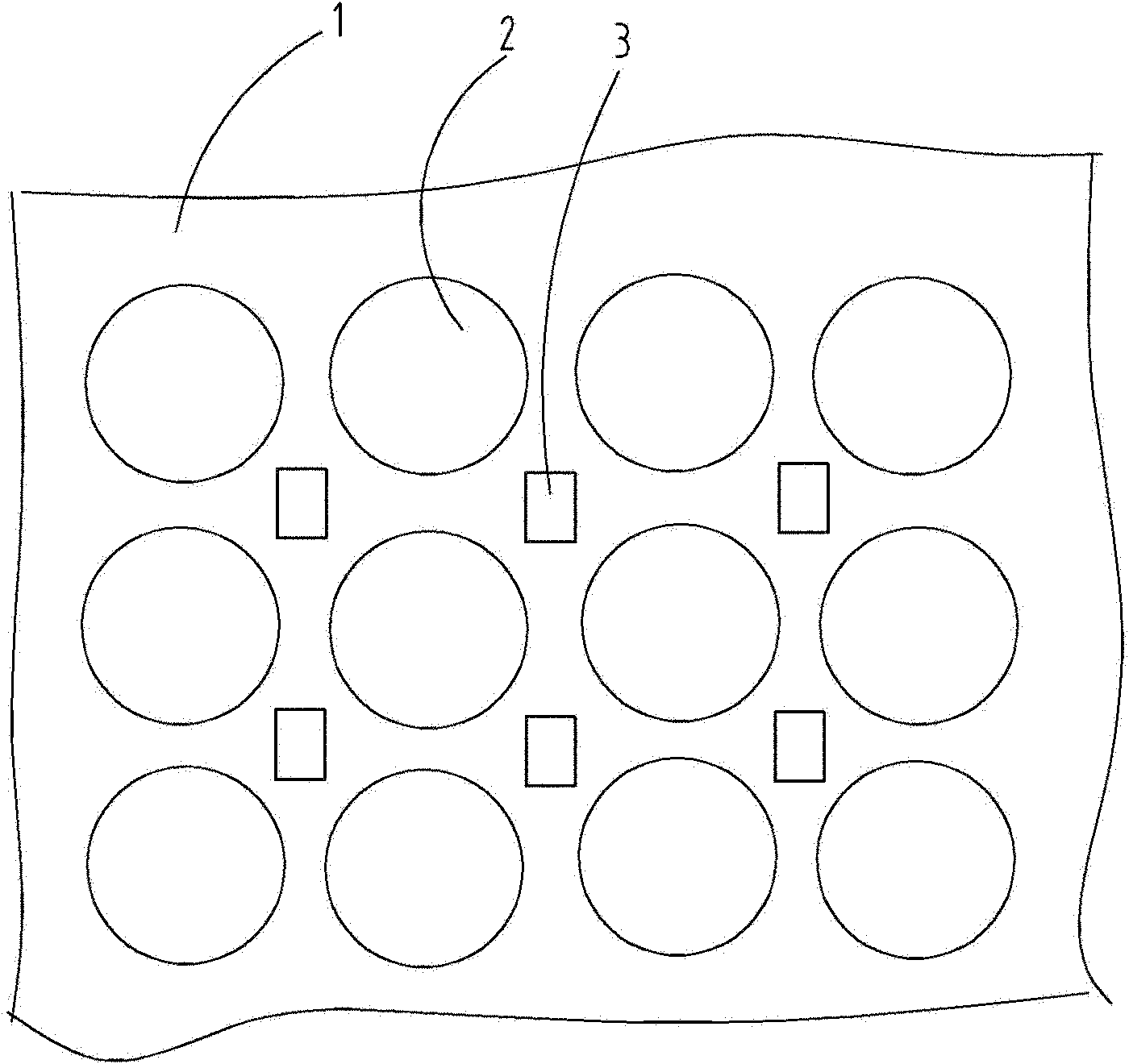
[0022] see figure 1 , figure 2 , the present embodiment is based on a flexible polyimide circuit board as the substrate 1, and a three-dimensional force sensing unit array and a temperature sensing unit array are respectively arranged on the substrate 1, and each three-dimensional force sensing unit 2 in the three-dimensional force sensing unit array And the temperature sensing units 3 in the temperature sensing unit array are arranged at intervals; and the surface height of each temperature sensing unit 3 is lower than the surface height of each three-dimensional force sensing unit 2, forming an overall concave-convex distribution form.
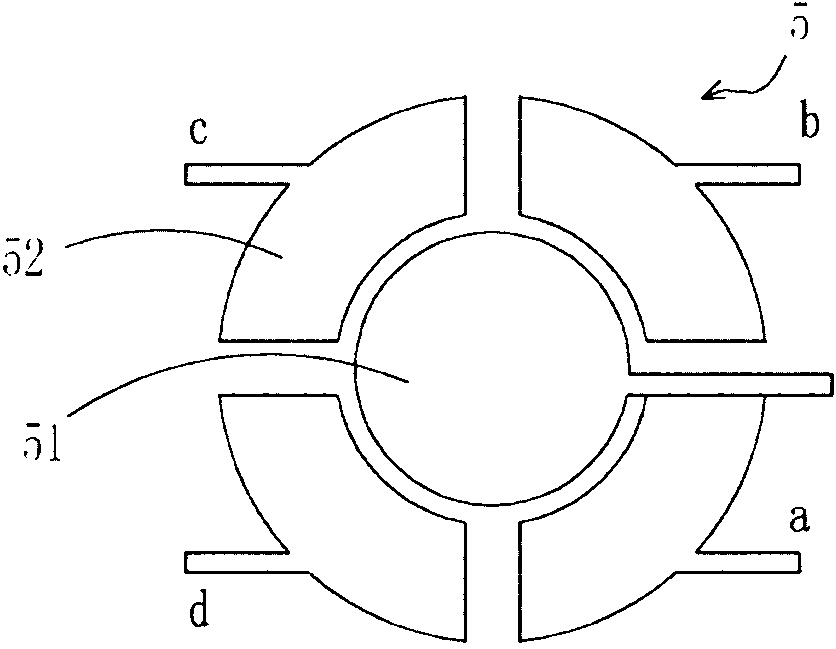
[0023] In specific implementation, the three-dimensional force sensing unit 2 uses carbon black filled silicone rubber as the pressure sensitive material, and is set as a disc-shaped flexible pressure-sensitive conductive rubber; the temperature sensing unit 3 uses carbon fiber filled silicone rubber as the temperature sensitive material, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More