

Location and environment modeling method of intelligent movable robot
A technology of mobile robots and modeling methods, which is applied in the directions of instruments, surveying and navigation, measuring devices, etc., and can solve the problems of increasing errors and large errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
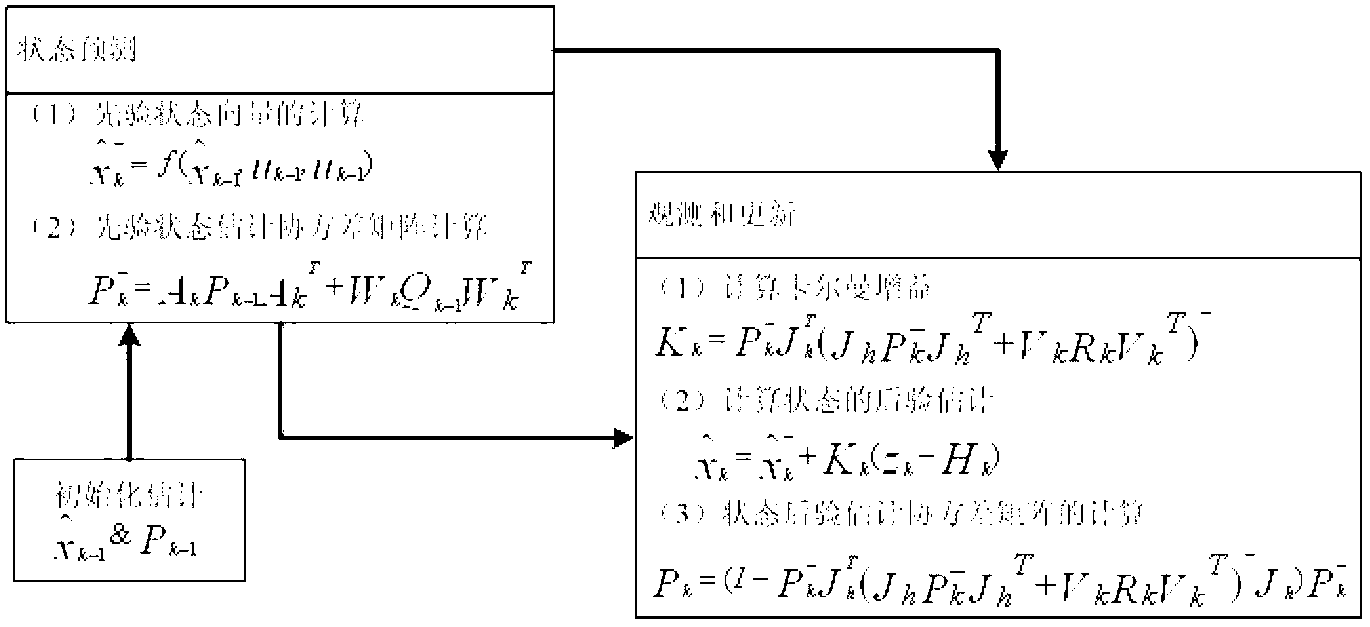
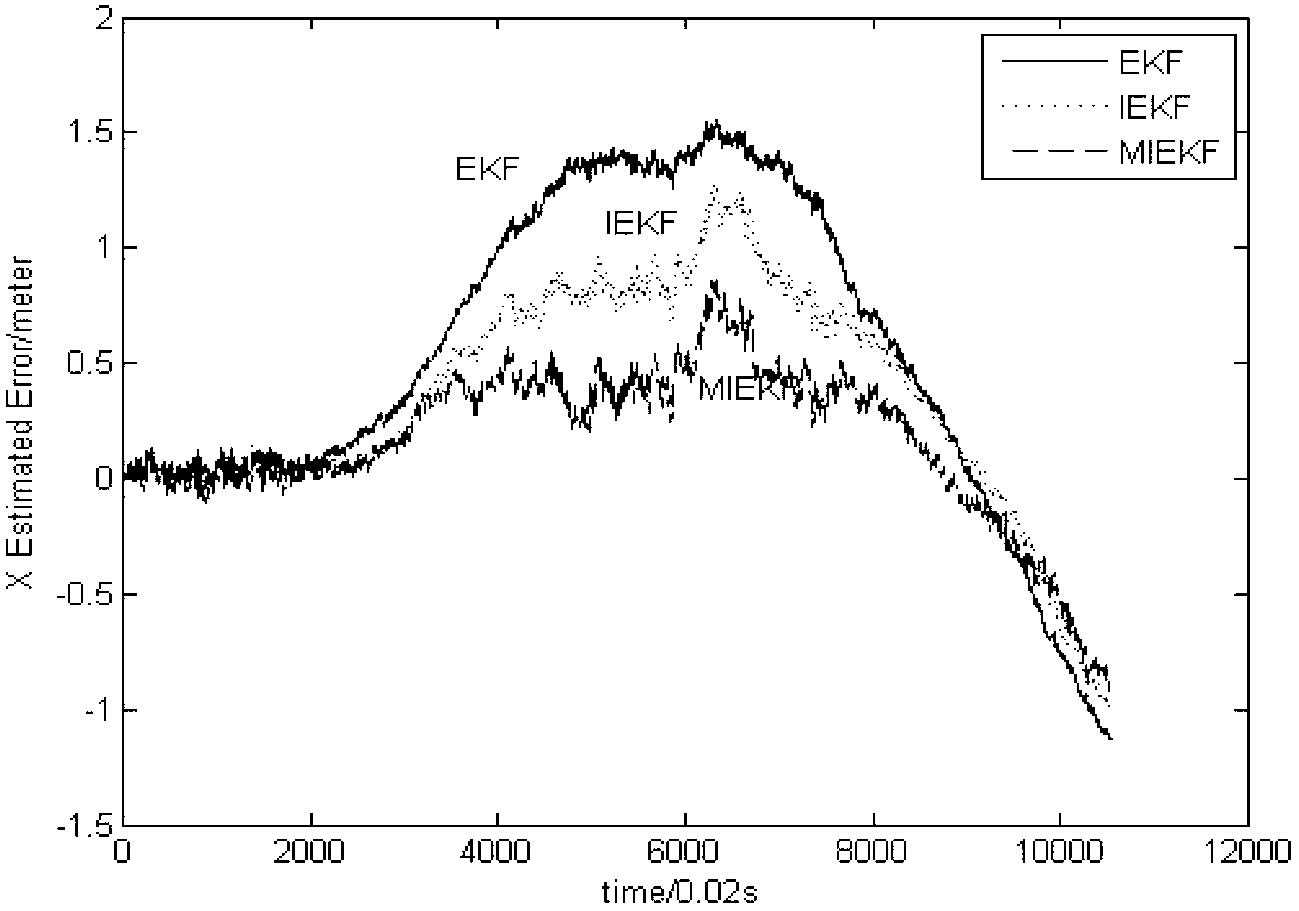
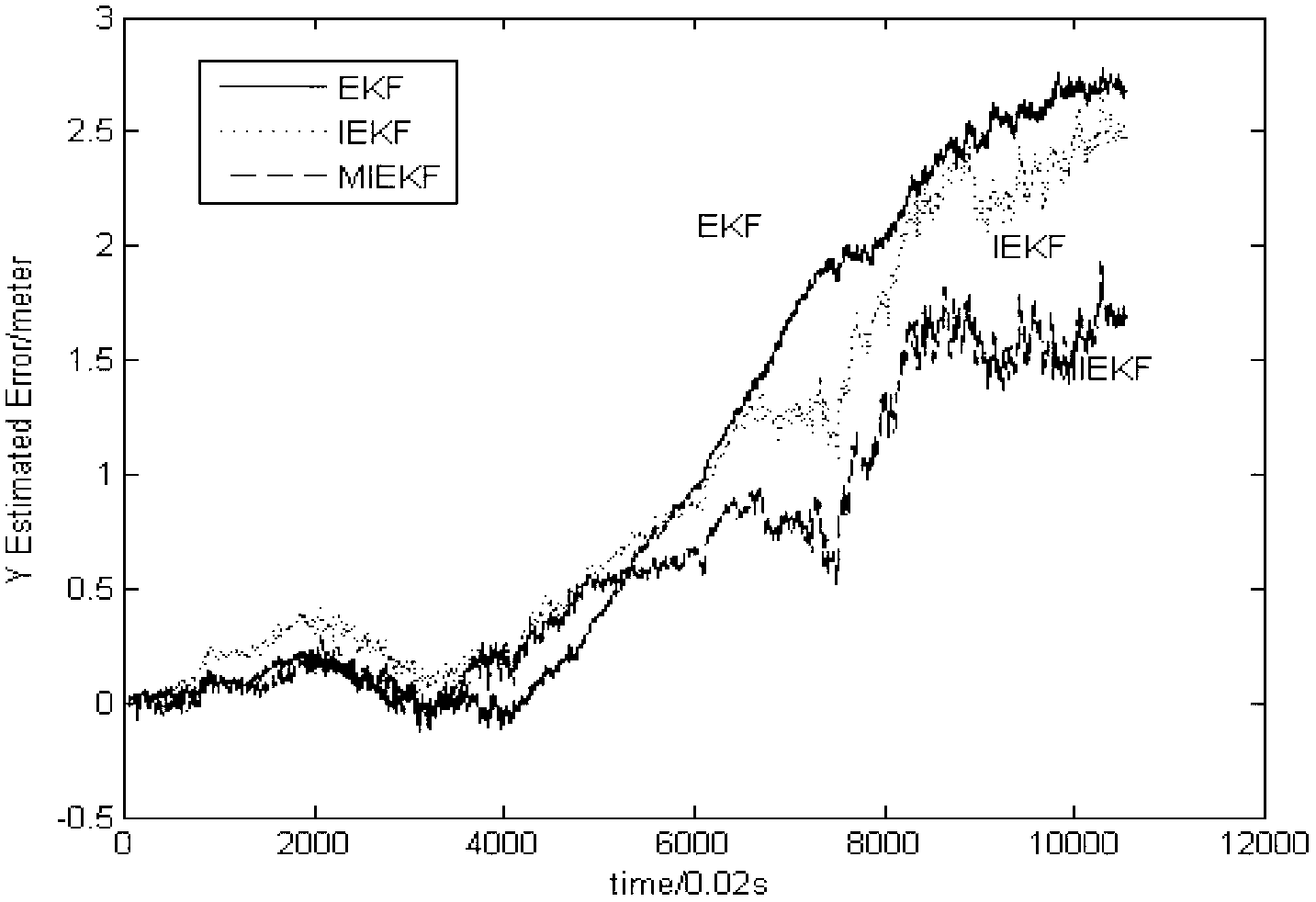
[0060] figure 1 It is the schematic diagram of MIEKF algorithm; figure 2 is the estimated error effect of EKF / IEKF / MIEKF on the X-axis; image 3 is the estimated error effect of EKF / IEKF / MIEKF on the Y axis; Figure 4 is the estimation error effect of EKF / IEKF / MIEKF on the direction angle; Figure 5 update graph for EKF cycle; Image 6 It is a schematic diagram of SLAM; Figure 7 is the robot motion model, Figure 8 It is a flowchart of the MIEKF algorithm, as shown in the figure: a positioning and environment modeling method for an intelligent mobile robot provided by an embodiment of the present invention includes the following steps:
[0061] S1: Form a modified iterative extended Kalman filter algorithm, and determine the number of iterations;
[0062] S2: Establish the motion model x of the mobile robot k ;
[0063] S3: Establish the observation model z of the mobile robot k ;
[0064] S4: Initialize the prior state variables of the mobile robot prior covaria...
Embodiment 2
[0097] The positioning and environment modeling method of an intelligent mobile robot provided by the present invention is based on the most widely used extended Kalman filter algorithm in the field of simultaneous positioning and environment modeling of mobile robots, and the algorithm is improved so that the algorithm The performance has been greatly improved, which can better meet the application in SLAM. It also provides strong technical support for mobile robots to navigate autonomously in unknown environments and complete complex intelligent tasks.
[0098] The principle of the positioning and environment modeling method of the intelligent mobile robot is described in detail below:
[0099] First of all, the extended Kalman filter algorithm is to expand the nonlinear function by Taylor series, and ignore the second order and above order, so as to obtain an approximate linear model, thereby skipping the influence of linearization. After the approximate linear model is ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More