

Double-cycloid speed reducer of RV-E type substituted industrial robot
An industrial robot, RV-E technology, applied in mechanical equipment, transmission parts, gear transmissions, etc., can solve the problems of difficult grinding, slow tapping speed, low yield, etc., and achieve low mechanical manufacturing process difficulty, The effect of high processing efficiency and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
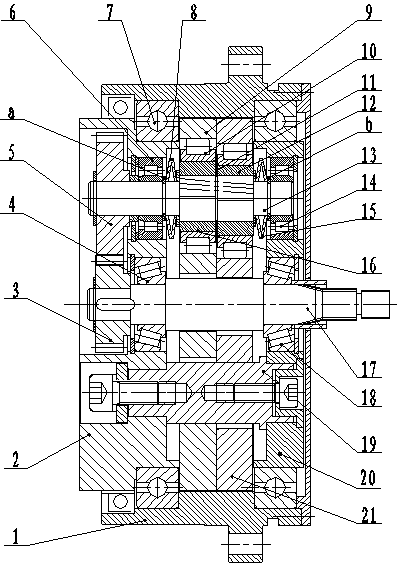
[0009] Such as figure 1 As shown, a double cycloid reducer for an industrial robot that replaces the RV-E type includes a planetary transmission part and a double cycloid transmission part. The planetary transmission part includes a central shaft 17, a sun gear 3, a planetary gear 5 and an input shaft 13 , the double cycloidal transmission includes the first and second cycloid wheels 9,21, the first and second eccentric bearings, the hypocycloid ring gear 1 and the left and right frames 2,20, the left and right frames Use three or four positioning columns 19 to locate and connect with screws to form a rigid body. The left and right frames 2, 20 are respectively supported by bearings 7, 10 in the inner holes on both sides of the hypocycloid ring gear 1, and the central shaft 17 is respectively supported on the left and right frame 2, 20 central holes with the first and second bearings 4, 18, and the input shaft 13 is respectively supported on the left and right frame 2, 20 with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More