

A robot control system for mining environment detection
A control system and robot technology, applied in manipulators, manufacturing tools, etc., can solve the problems of large explosion-proof structure load, high development cost and high power consumption, and achieve the effects of improving battery life, reducing development cost and low power consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
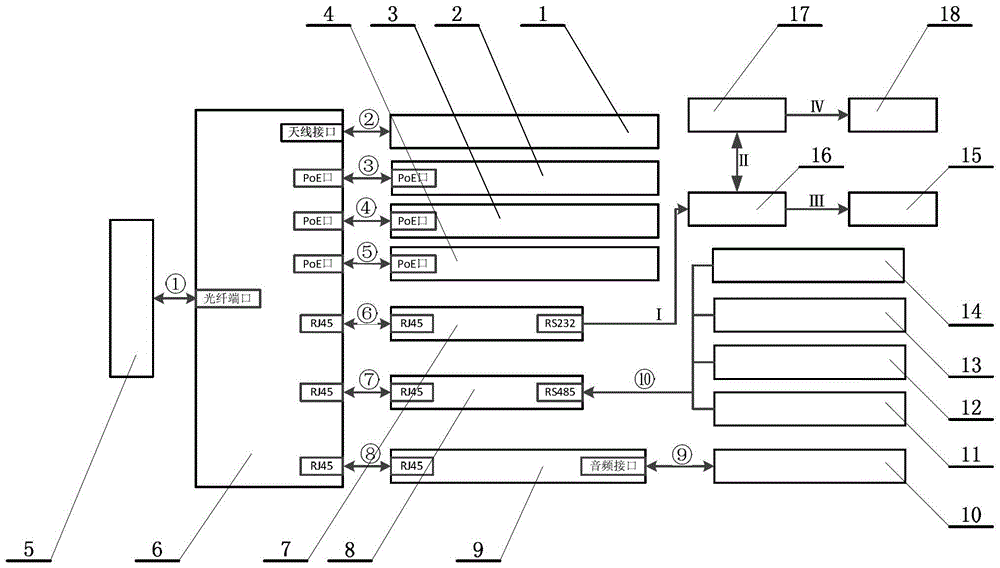
[0019] in the figure 1Among them, the control system includes a forward antenna 1, a nose network camera 2, a tail forward network camera 3, a rear rear network camera 4, a relay module 5, an Ethernet network server 6, a motion control board 7, a data Acquisition board 8, audio intercom module 9, intrinsically safe intercom system 10, wind speed sensor 11, gas sensor 12, obstacle avoidance sensor 13, pose sensor 14, motor I15, driver I16, driver II17 and motor II18; the ether The network server 6 is an eight-port switch capable of implementing Power over Ethernet (PoE). The optical fiber port of the Ethernet network server 6 is connected to the relay module 5 through a fiber jumper ①, and the antenna interface of the Ethernet network server 6 is connected through a network cable ② Connect with the forward antenna 1 to form a communication system, establish a wireless WLAN connection with the forward robot relay module through the forward antenna 1, and establish a wireless WLA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More