

Full-pneumatic vacuum absorption type wall-climbing robot
A wall-climbing robot and vacuum adsorption technology, which is applied in the field of wall-climbing robots, can solve the problems of large wear on the adsorption surface, small motion torque, and low load resistance, and achieve reliable adsorption performance, simple direction control, and large motion torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
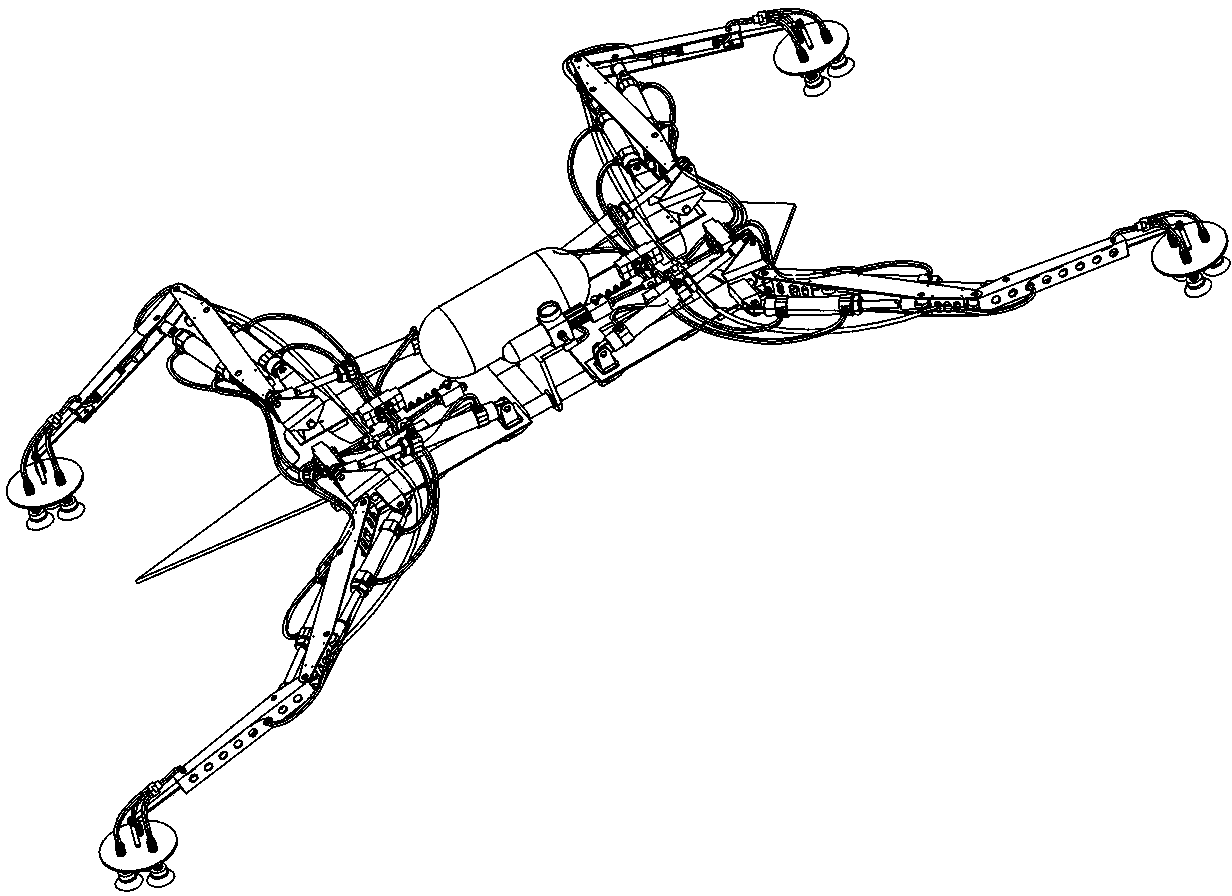
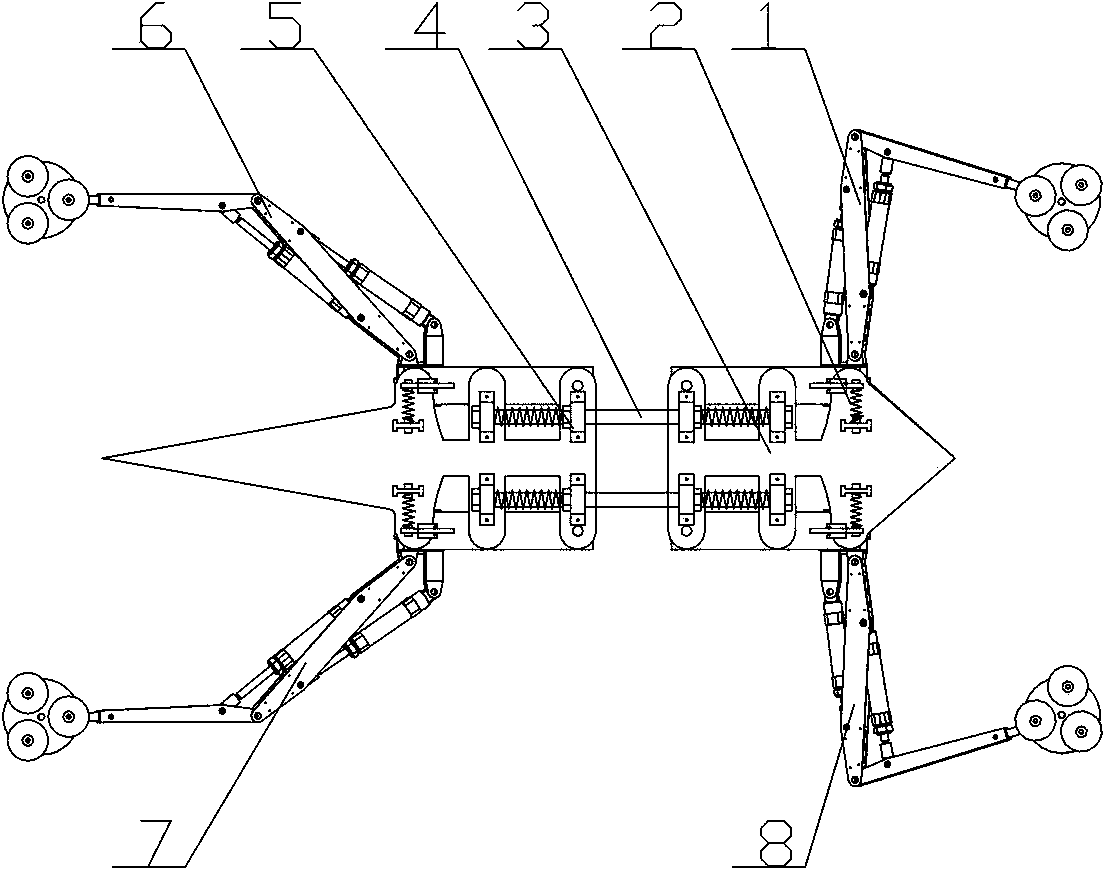
[0027] Embodiment 1, the present invention includes four limbs, a fuselage that can be compressed within a certain range, a pneumatic system, a suction cup group 16 connected to the legs, and a vacuum generator 10 arranged on the legs, and is characterized in that: The legs and legs are installed on both sides of the fuselage in a front-to-back symmetrical layout. The front and rear of the fuselage can be compressed within a certain range. ; One end is connected with the fuselage through the buffer device 2 . Its purpose is to solve the problem of over-constraint when multiple legs are linked in the crawling process, and avoid the internal force caused by over-constraint from affecting the attached suction cup, thereby enhancing the adsorption stability of the whole machine. refer to Figure 1 to Figure 12 .
Embodiment 2
[0028] Embodiment 2, the fuselage of the present invention includes a fuselage front frame 3 and a fuselage rear frame 5 connected by an elastic connecting device 4; the fuselage front frame 3 includes a fuselage front frame bottom plate 31, and the fuselage front frame bottom plate 31 is provided with two left and right symmetrical front guide parts 32, the rear frame 5 of the fuselage includes a rear frame bottom plate 51, and the rear frame bottom plate 51 is provided with two left and right symmetrical rear guide parts 52, and the elastic connecting device 4 is composed of two The two ends of the guide rod 42 are respectively inserted into the corresponding front guide part 32 and the rear guide part 52. By changing the position of the positioning sleeve 43 To adjust the length of the fuselage, the distance between the front and rear fuselages can be determined by adjusting the position of the positioning sleeve 43, and also can be determined by adjusting the spring force o...
Embodiment 3
[0029] Embodiment 3, the limbs include the forearm 11, the big arm 12, the shoulder 13 and the limb base 14 which are sequentially connected in a hinged manner. Each limb has three degrees of freedom, and the connection is provided with a cylinder. The reasonable layout of joints and cylinder hinge points, limbs and legs can achieve stretching, swinging and large-angle lifting and pressing actions, which play an important role in the execution of straight walking, turning, reversing, crossing obstacles and wall transitions of wall-climbing robots; forearm The tip of 11 is connected with the suction cup group 16, and the arm 11 is provided with a vacuum generator 10 and an electromagnetic one-way valve 98 connected with the vacuum generator 10. Directional valve 98 makes vacuum in vacuum chuck group 16 by electromagnetic one-way valve 98 and vacuum generator 10, and arc-shaped clamping groove 15 is provided on limb base 14, can constitute groove type and clamp fuselage frame. r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More