

Operation method for stepping constant torque control on permanent magnet brushless direct current motor
A permanent magnet brushless DC, operating method technology, applied in the direction of motor generator control, electronic commutation motor control, control system, etc., can solve problems such as inability to position, different torques, and large step angles of motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] A. The device and operation used in the operation method:
[0058]The device used in the operation method of the constant torque step control of the permanent magnet brushless DC motor includes a DSP control module 1, a power circuit 2, a permanent magnet brushless DC motor 3, an encoder position detection module 4 and an input power supply module 5, wherein, The input power supply module 5 supplies power for the DSP control module 1, the power circuit 2 and the encoder position detection module 4, and the DSP control module 1, the power circuit 2, the permanent magnet brushless DC motor 3 and the encoder position detection module 4 are connected with wires in sequence , the encoder position detection module 4 is connected to the DSP control module 1 with wires; first, the input power supply module 5 supplies power to the DSP control module 1, the power circuit 2 and the encoder position detection module 4, and then the encoder position detection module 4 detects The ro...
Embodiment 2
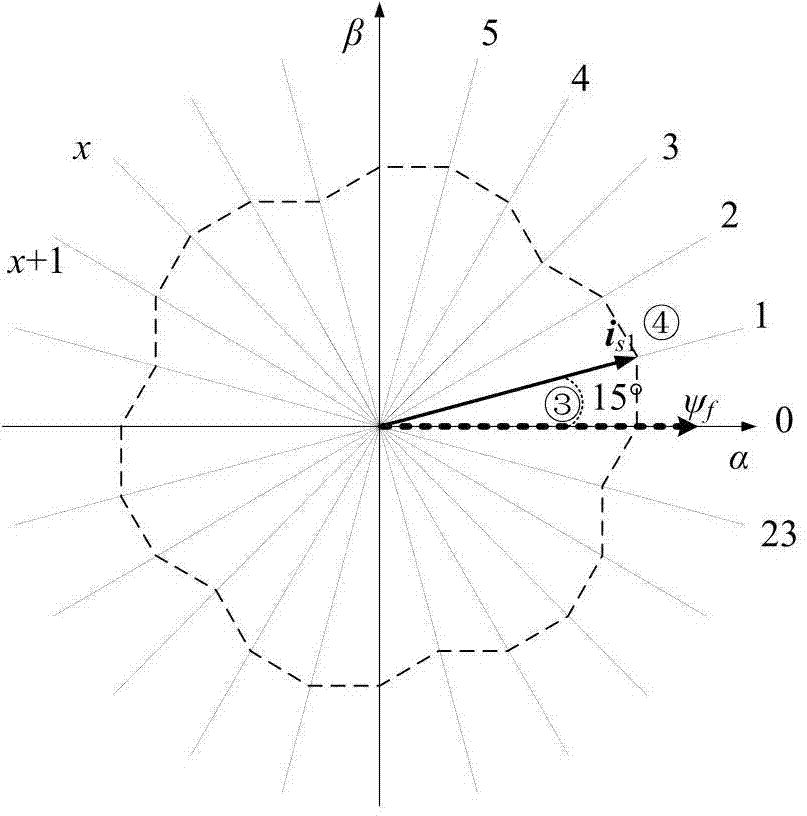
[0075] In this embodiment, within a cycle period, the three-phase current is discrete according to the operation method of the present invention, and the number of cycles is b H = 24, when the current vector is 1 step ahead, the motor is controlled to run step by step, and the current vector is given a step forward every 0.1s, and the current-time curve of phase A of the motor is observed (see Figure 6 (1)), and the rotor step operation position- Time curve (referring to Fig. 6 (2)) and output electromagnetic torque-time curve (referring to Fig. 6 (3)), as can be seen from the result, the present embodiment follows the first step to the first step of the B operating method of embodiment 1 The current vector calculated in three steps is used to control the initial torque corresponding to each step. The electromagnetic torque is a constant value of 0.8Nm, and the rotor of the permanent magnet brushless DC motor 3 advances a mechanical step angle θ every time. bm = 7.5° process i...
Embodiment 3
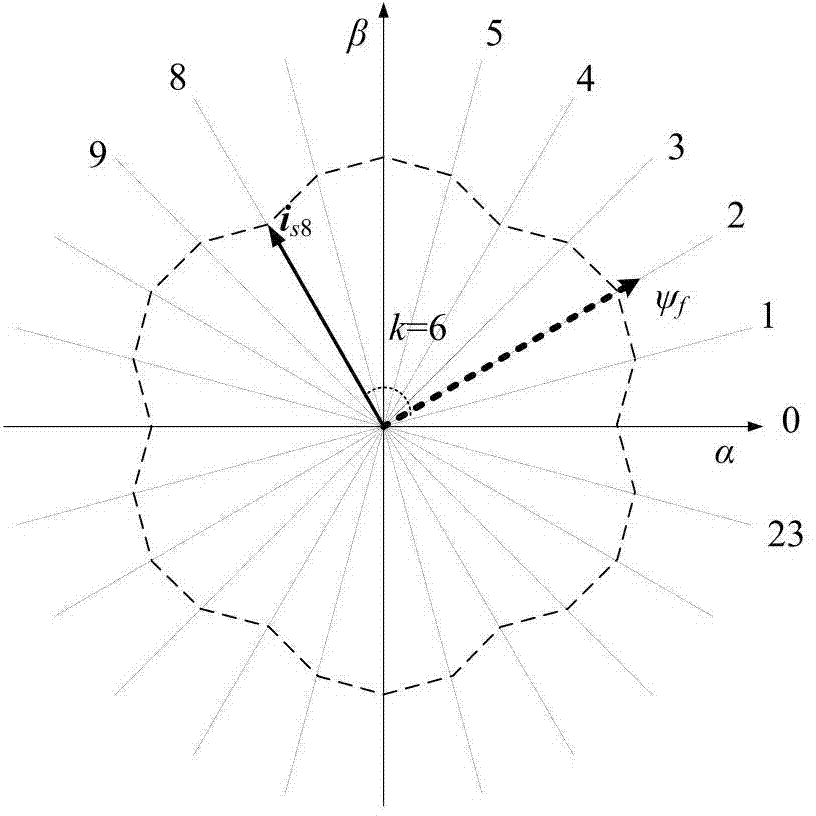
[0077] In this embodiment, within a cycle period, the three-phase current is discrete according to the above-mentioned constant torque step control, and the number of cycles is b H =24, set the mechanical speed of the motor to 125r / min, and set the electromagnetic torque to T * = 3N m, adopt the advance step number k=6 to control, calculate the corresponding current vector according to the steps from the first step to the third step of the B operation method of embodiment 1, and obtain under the constant speed running state of the calculation and observation motor Phase A current-time curve ((see Figure 7(1)), rotor stepping position-time curve ((see Figure 7(2)) and output electromagnetic torque-time curve (see Figure 7(3)) The initial electromagnetic torque when the current vector is switched is the same. Due to the change of position, the electromagnetic torque will drop or rise, and it will change within ±0.4Nm according to a certain rule. Provides a relatively stable loa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More