

Robot motion control system
A robot motion and control system technology, applied in digital control, electrical program control, control using feedback, etc., can solve the problems of poor system openness, poor versatility, and poor scalability, so as to reduce communication bandwidth and avoid unpredictability Errors, effects of strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
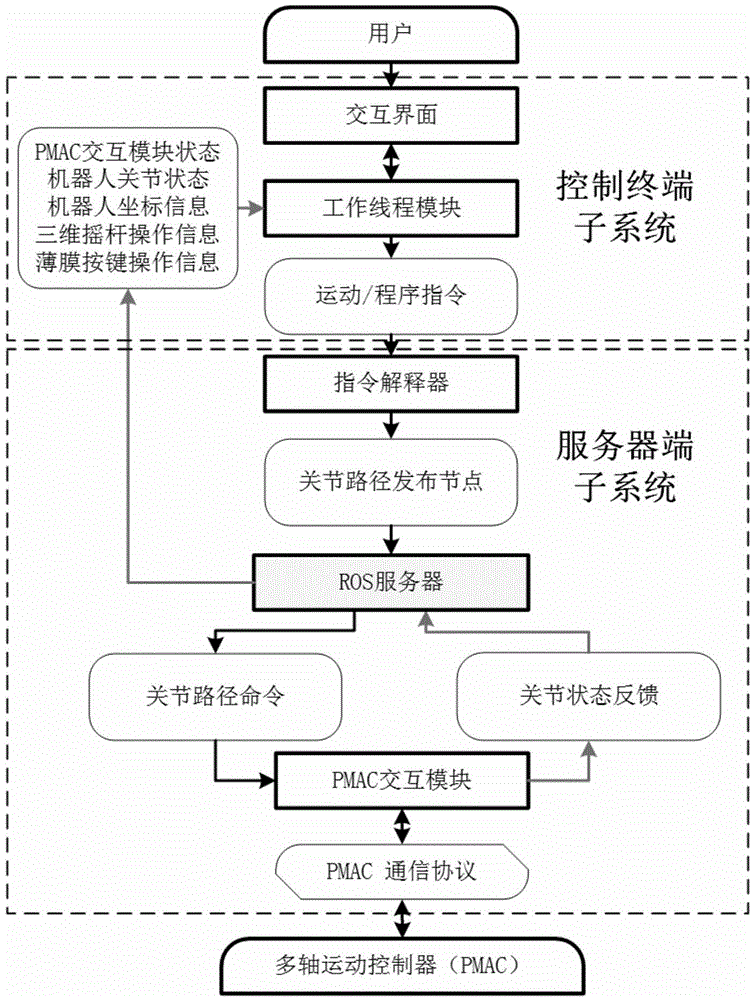
[0066] The software developed based on the robot control system of the present invention includes the main program software at the server end of the control system. It has an interface to communicate with the controlling terminal, a mechanism to process terminal commands, and an interface to communicate with the underlying hardware. That is, the robot controller software includes a communication interface with the upper-level control terminal, a method for parsing and executing commands from the upper-level control terminal, and a communication interface for deploying underlying hardware;
[0067] The server main program structure is as follows figure 1 As shown, the subroutine instruction interpreter is used to process the commands sent from the user terminal to the server, and through the MoveIt! Plan the movement of each joint of the robot and pass it to the subroutine PMAC interactive module; the PMAC interactive module converts the trajectory planning result into a comma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More