

Digestive endoscopy assisting interventional robot control system and method
A digestive endoscope and control system technology, applied in endoscopes, internal fixators, gastroscopes, etc., can solve the problems of high physical exertion and expensive operating environment for medical staff, so as to ensure physical and mental health, reduce operation difficulty, and improve safety sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
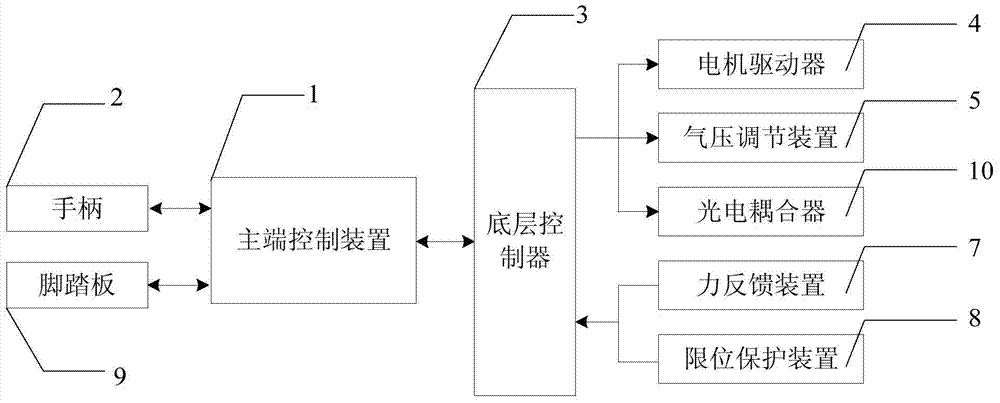
[0052] Such as figure 1As shown, a digestive endoscope-assisted interventional robot system includes a main-end control device 1, a handle 2, a bottom controller 3, a motor driver 4, an air pressure adjustment device 5, a solenoid valve 6, a force feedback device 7, and a limit protection device 8. Pedal 9 and photoelectric coupler 10; the force feedback device 7 includes a resistance measuring device 701 and a resistance moment measuring device 702 installed at the actuator end of the robot, for measuring the resistance encountered at the proximal end during the intervention of the digestive endoscope and resistance torque, the air pressure regulating device 5 is used to adjust the air pressure of the air circuit, control the clamping force of the actuator on the digestive endoscope and the pressure on the button of the digestive endoscope op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More