

Digital flat panel ray detection ray source end robot based on Mecanum wheels
A technology of radiographic inspection and digital flat panel, applied in the direction of using radiation for material analysis, elastic suspension, suspension, etc., can solve the problems of blank, insufficient flexibility in welding seam inspection, inability to meet demand, etc., and reduce the manufacturing period and cost. , Realize the effect of testing automation and shortening testing period
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
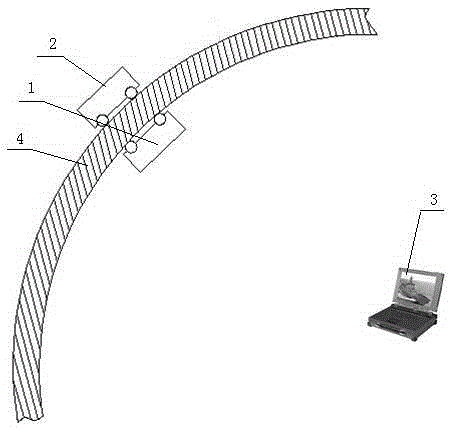
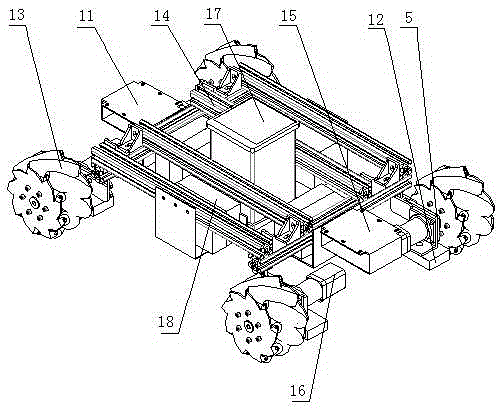
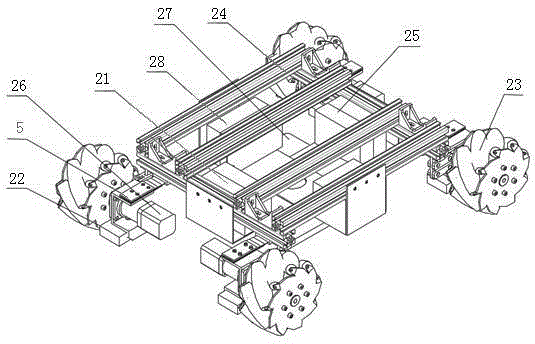
[0043] A digital flat-panel ray inspection system based on Mecanum wheels, such as figure 1, including host computer 3, ray source robot 1, and digital flat panel detector robot 2. Both ray source robot 1 and digital flat panel detector robot 2 adopt an all-round Mecanum wheel structure, and ray source robot 1 is equipped with motion control Box one 18, the motion control box one 18 is connected with the upper computer 3 and the digital flat panel detector robot 2 through the wireless communication module one, the motion control box one 18 is connected with the servo motor one 16 through the CAN communication module one, and the digital flat panel detector terminal robot 2 is provided with motion control box 2 28, motion control box 2 28 is connected with upper computer 3, ray source end robot 1 through wireless communication module 2, and motion control box 2 28 is connected with servo motor 2 26 through CAN communication module 2.
[0044] The ray source robot 1 includes a v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More