

Robot special for wave compensation and wave compensation method
A technology of wave compensation and robotics, which is applied in the directions of manipulators, program-controlled manipulators, and equipment for increasing the stability of ships. It can solve the problems of disjoint wrist rotation axes, small movement space, and large overall weight, so as to increase the working space and flexibility. Accurate, achieve overall position adjustment, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
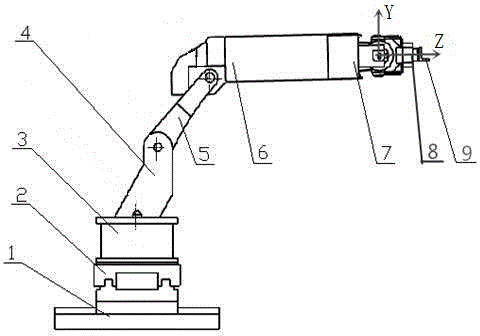
[0023] see figure 1 The bottom of the special robot for wave compensation shown is the adjustment guide rail. The adjustment guide rail is composed of the longitudinal guide rail combination 1 and the horizontal guide rail combination 2. The lower part is the longitudinal guide rail combination 1, and the upper part is the horizontal guide rail 2. The adjustment guide rail passes through the lower longitudinal guide rail combination 1. The bolts are fastened to the deck of the ship. The upper end of the adjustment guide rail is a mechanical arm, and the mechanical arm is mainly composed of a mechanical arm base 3, a large arm 4, a connecting arm 5, and a small arm 6. The mechanical arm base 3 is fixed on the adjustment guide rail by bolts, so that the whole mechanical arm is connected to the adjustment guide rail through the mechanical arm base 3 . A position sensor is installed at the center of the base 3 of the manipulator to detect the roll, pitch and heave of the robot as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More